
一种基于人工神经网络的遥感图像去条带方法
引言
红外焦平面探测是一种兼具辐射敏感和信号处理功能的新一代红外探测技术,但是由于制造过程和工作环境的影响, 使得焦平面阵列(FPA ) 各个阵列元即使在相同的辐射通量照射下,也会输出不相同的响应电压。这种红外响应引起的遥感图像的失真被称作红外图像的非均匀性。为了提高观测频率、扫描范围和空间分辨率,航天遥感一般采用推扫式的多元敏感线阵列对地物成像,通过观察发现,推扫得到的遥感图像出现有规律的条带失真,条带宽度与遥感器多元敏感元个数的扫描线宽度一致,而且随着时间的推移,条带现象日趋严重,与单敏感元扫描图像中的噪声相比有明显差异,这种失真其实是焦平面非均匀性的一种表现形式。条带失真是影响线阵列红外遥感图像质量的主要因素,必须要用诸如定标的方法去除,但是由于探测器单元响应会随着时间和工作环境的变化改变,所以仅仅用定标的方法来校正条带失真有很大的局限性。
&nbs

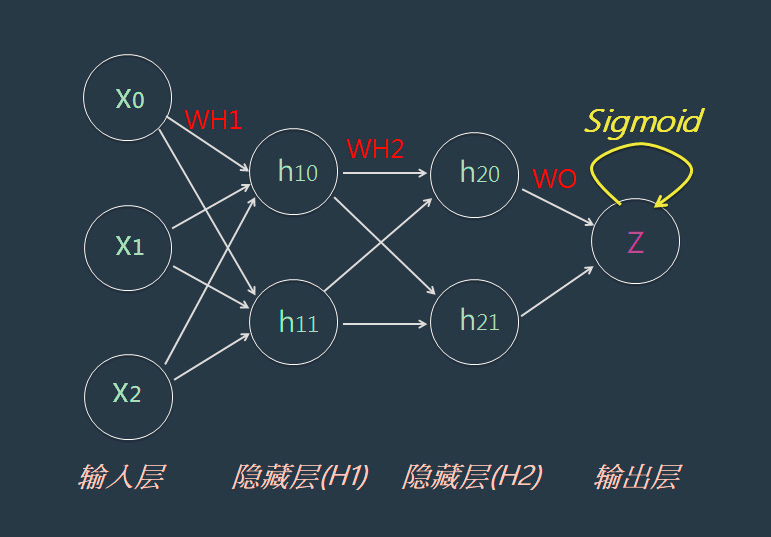
图1 BP网络结构图
本文对焦平面非均匀性校正的神经网络法进行改进,介绍了一种基于人工神经网络的遥感图像条带消除的方法。这种方法可以完全不对FPA进行标定(或自动标定),并且可以通过线性和非线性模型校正,是红外成像系统非均匀性校正的理想方法。
传统校正方法
线性校正假设探测器单元的响应呈线性:
y = ax + b
式中,x 为某一探测器单元的输入信号,y 为可测的输出信号。如果能求出增益因子a 和偏移因子b,就可求得无畸变的输入信号x 。
传统的非均匀性校正方法是在红外焦平面成像系统使用前,用标准的两个或多个参考温度源,对每一个阵列单元响应进行定标,以保证每个阵列单元在两个或多个参考温度之间有相同的响应,其校正值被存储起来,在进行数字处理时固定地将其叠加上去。如果每个阵列单元的输出特性随时间是完全线性和稳定的,那么,在上述定标温度范围内,这种校正是有效的,不过随着阵列数的增加,存储校正系数所需要的存储容量就大为增加。再加上系统的不稳定性、阵列单元的非线性和1/ f 噪声等因素的影响,使得经过一段时间后,阵列单元特性会发生漂移或温度背景范围出现变化,必须对红外焦平面阵列进行再定标。显然,这类校正方法不但麻烦,而且可能并不符合实际使用情况,从而导致校正效果不佳,因此,必须研究自适应的非均匀性校正方法。
神经网络法
神经网络法的主要特征是通过自学习模拟信息内部关系,进而获得系统特征参数。假设输入x和输出y之间有一种复杂的关系f,神经网络通过不断调整结构的权重系数和阈值得到逼近的关系f眨沟脃=f’(x); Rumelhart 和Mcclalland提出的多层前馈网络的反向传播算法(BP算法) ,由于解决了感知器不能解决的多层网络学习算法的问题,可以很好地对复杂函数进行逼近,在工程中得到了广泛的应用。一般使用的BP网络是一个三层前向网络,结构如图1所示。
假定校正输出为Y(n),输入为X(n),则:
Y(n)=WT(n)X(n)+VT(n)
其中W和V是增益矢量和截距矢量,神经网络法就是不断依据实际景像调整W和V,来去除条带失真。根据三层BP网络结构,在中间层根据一定的法则计算某像素输出,并以此作为该像素的输出,反馈给线性校正神经元来调整W和V。调整以误差信号均方值最小为准则。
对每一次迭代,令期望响应与输出响应之差为误差,用e(n)表示,则:
e(n)=f(n)-Y(n)=f(n)-WT(n)X(n)+VT(n)
其中,f(n)表示期望的校正后输出,则误差函数为:F(W,V)=(Wx+V-f)2,利用最陡下降法,可以得到计算W和V的迭代公式:
Wn+1=Wn-2ax(y-f)
Vn+1=Vn-2a(y-f)
式中:n为帧数,a为步长。
神经网络算法的改进
从上面的分析可以得到,神经网络法对非均匀性的校正的关键是如何建立期望的校正输出模型,在非线阵列的焦平面非均匀性校正中,一般将校正元相邻元的输出平均值作为本元的期望输出带入网络进行网络训练,发展出了4领域和8领域等方法。对于线阵列,由于探测单元只有两个相邻的探测元,直接应用上面的方法进行网络训练,校正效果不是太好。鉴于此,对算法进行如下改进。

假设一幅图像有n条扫描线组成,对于每一条扫描线响应,可以用Yk(i)表示,其中k表示第k条扫描线 ,i表示线阵列的第i个探测元。可以将线阵列扩展为有三条线阵列的焦平面,在第k次成像时,焦平面成像为[Yk-1(i):Yk(i):Yk+1(i)],这样就可以假定Yk(i)的期望校正输出为:
Y’k(i)=1/8(Yk(i-1)+Yk(i+1)+Yk-1(i-1)+Yk-1(i)+Yk-1(i+1)+Yk+1(i-1)+Yk+1(i)+Yk+1(i+1))
算法过程如下:
1.计算邻域平均值:
Y’k(i)=1/8(Yk(i-1)+Yk(i+1)+Yk-1(i)+Yk+1(i)+Yk-1(i-1)+Yk+1(i+1)+Yk-1(i-1)+Yk+1(i+1))
2. 令y = Wx + V ,其中W为增益校正因子,V为偏移量校正因子。误差函数:
F(W,V)=(Wx+V-f)2
利用此函数的梯度函数和最陡下降法,可以得到计算和的迭代公式:
Wn+1=Wn-2ax(y-f)
Vn+1=Vn-2a(y-f)
式中 n为帧数,a为步长。
3.利用线性校正算法得到:
Yn+1=Wn+1















评论