
智能化海豚动力电源设计
摘要:为解决对海洋探测和海洋环境污染实时监测的电源问题,通过把微型水力发电机系于海豚身上,随着海豚运动时海水的反作用力驱动水力机转动发电,经整流滤波稳压后给锂电池板充电,从而海洋探测和海洋环境污染监测时可以使仪器获得稳定的电源。利用压力传感器、单片机、电磁控制和无线传输网络,增加该智能化海豚动力电源的可靠性和实用性,实现对仪器的回收和避免仪器对海洋环境的污染。
关键词:海豚;微型水力发电机;压力传感器;电源设计
人们一直都在不断地探索海底世界,保护海洋珍稀动物和人类赖以生存的海洋环境。由潜水员携带摄像潜入水下对海底世界进行拍摄。但潜水员在水下的活动时间和深度非常有限,对极为丰富的海豚和辽阔的海底世界获取的资料是微不足道的。另外由于海洋面积占地球面积的79%,开发利用海洋为人类经济建设服务,使海洋的经济开发利用和保护海洋动物与海洋环境和谐发展,必须对海洋环境参数进行实时监测,仪器的长期供电成为一个极大的难题。把监测仪器与海豚动力电源集成于一体,一同系于海洋动物身上,利用海豚的运动和海水的反作用力,使系在海豚身上的微型发电机转动发电,经DC—AC转换和给电池板BH充电,获得稳恒直流电源。实现了对海洋环境参数进行实时监测,对加强保护海豚动物和海洋环境,对海洋的持续开发利用都具有极其重大意义。
1 海豚动力电源
1.1 海豚动力电源的组成
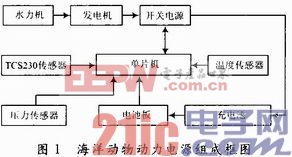
为了使海豚原地不动时,发电系统能照样有电能供给仪器进行实时监测,而不遗漏关键数据和关键的图片采集。因此,海豚动力发电系统是由水力机、发电机、开关电源、充电器、电池板和防水附件等组成,其组成框图,如图1所示。
1.2 海豚动力水力发电机组的结构
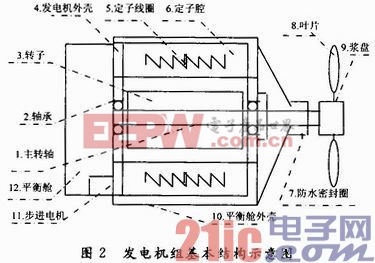
由于发电机组是系在海豚身上,利用它们的运动,由海水的反作用力驱动水轮机转动,水力机再驱动发电机转动发电。由于海豚的运动速度范围为0~70 km,没有固定速度值,而发电机不得超过额定值工作。因此发电机上安装有一个限速电路,保证发电机安全运行;由于海豚的运动范围离水面为0~450 m。因此,防水密封的性能要求比较高,必须增加防海水渗漏,以免产生绕组线圈短路烧毁电机。为了使运载电源的海豚一感受到有外加重物系于它身上,产生不适的负担,增加一平衡舱,通过调节其体积,使浮力等于重力。整个海豚动力水力发电机组的结构示意图,如图2所示。
1.3 水力机工作基本原理
该研究的水力机不同于传统的水轮机,也不同于轮船上的螺旋桨,而是象风力发电的风机。传统的风机是依靠风力推动风机转动,该水力机是利用海水产生的相对运动,使水力机获得海水的反作用力而转动的。设带水力机的海豚前进速率为v(单位:ms-1),水力机叶片的长为L,距水力机一定距离的上游相对海水流速为V1(单位:ms-1),距水力机远处的下游海水相对速度为V2(单位:ms-1),海水通过水力机水轮时的实际相对速度为V(单位:ms-1),由文献的方法推导得,作用在水轮上的力和提供的功率分别为:
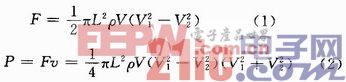
式中:ρ为海水密度(单位:kg/m3);V=(V1+V2)/2。








评论