
基于PIC16F877A的CAN智能传感器设计
随着科学技术的进步和发展,对车辆驾驶性能和安全舒适性的要求大为提高,使得车辆上的电子控制单元数量逐步增加,但是,车辆上的电控单元(如,各种开关、执行器、传感器等)的连接仍然以传统的配线束来实现,使得车内线束过多且布线复杂,从而造成了严重的电磁干扰,导致系统的可靠性下降。在高级轿车上,电子元件及其系统占据了整车超过20%的价格,而且,有日渐增加的趋势。在这种情况下,车内电控线路就会更加复杂,如何使车内的装置网络化,并降低配线束数量等成为改善车内系统的一个重点研究方向。
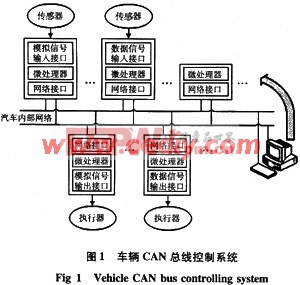
| 随着科学技术的进步和发展,对车辆驾驶性能和安全舒适性的要求大为提高,使得车辆上的电子控制单元数量逐步增加,但是,车辆上的电控单元(如,各种开关、执行器、传感器等)的连接仍然以传统的配线束来实现,使得车内线束过多且布线复杂,从而造成了严重的电磁干扰,导致系统的可靠性下降。在高级轿车上,电子元件及其系统占据了整车超过20%的价格,而且,有日渐增加的趋势。在这种情况下,车内电控线路就会更加复杂,如何使车内的装置网络化,并降低配线束数量等成为改善车内系统的一个重点研究方向。 在车辆的网络化与通信系统中,局部网络的方法越来越丰富,其中,CAN,Profibus,LON,ASI,EIB与eBus等网络技术已经发展的相当成熟,各种网络技术的标准化也相继出台,而且,这些成熟的网络技术已经完成集成化工作。CAN总线在稳定性、即时性及其性价比等方面在汽车应用中都显示出较强的优势,作为分布式控制中的局域网技术具有较强的竞争力。目前,很多汽车采用CAN总线将整个汽车控制系统联系起来统一管理,实现数据共享和相互之间协同工作,使车内线束布线方便可靠,提高了汽车整体的安全性和性价比,增强了自身的竞争力。 实现车辆系统的网络化控制的前提是网络接点的智能化设计,包括传感器、控制器和执行器的智能化。本文以线控电子节气门为研究对象,设计了脚踏板位置传感器、节气门位置传感器和节气门位置控制执行器的CAN总线智能化接点,以此为基础组成CAN总线控制网络,完成对节气门位置的精确控制。 1 车辆CAN总线与分布式控制系统结构 控制局域网(controller area network,CAN)属于工业现场总线,是德国Bosch公司20世纪80年代初作为解决现代汽车中众多的控制与测试仪器间的数据交换而开发的一种通信协议。1993年11月,ISO正式颁布了高速通信CAN的国际标准(ISO 11898)。CAN总线系统中现场数据的采集由传感器完成,目前,带有CAN总线接口的传感器种类还不多,价格也较贵。 车辆控制系统中存在大量传感器、电子控制单元、执行机构等,通常,多控制器共享同样的传感器信息,而且,实时性、快速性的要求较高,如何将它们连接起来组成分布式控制网络系统是现代控制系统的一个重要发展方向。现场总线控制系统(field control system,FCS)就是其中的一种典型的控制网络结构的实现。CAN属于现场总线的范畴,它是一种有效支持分布式控制或实时控制的多主串行总线,以其短报文帧和优异的CSMA/BA逐位仲裁协议而被受现场设备互连的青睐。 基于CAN总线的车辆分布式控制网络系统如图1所示,采用现场总线式集散系统(field distributed control system,FDCS)结构,由传感器、执行器、控制器智能节点以及CAN现场控制网络组成。多个智能节点各自独立完成数据采集、系统设定、运行控制等,通过CAN现场总线,各智能节点之间交换各种数据和管理控制信息。 |
2 线控电子节气门系统原理与结构
电子节气门控制技术最早出现于20世纪80年代初期,起初仅应用于高档轿车上。随着电子技术的日益发展,能源问题和环境问题的日益突出以及对汽车性能要求的提高,电子节气门成为全电控发动机上最重要的控制装置,并已开始广泛应用到各种车辆上,其优点在于可根据驾驶员愿望、排放、油耗和安全需求,使节气门快速精确地控制在最佳开度,并可设置多种控制功能来改善驾驶安全性和舒适性。目前,对这一技术进行研究的有BMW,BOSCH,丰田等公司,而且,BMW,通用,丰田,AUDI等厂商在其部分车型上已经成功应用。
如图2所示,系统由加速踏板位置传感器和电子节气门体组成,节气门体包括执行器、节气门阀和节气门位置传感器3部分,它们被封装为一体。执行器由一个直流电机和相关的传动部件组成。加速踏板是一个高精度线性电位器,作为驾驶员期望的节气门开度的传感器装置,其输出是一个与脚踏板行程成正比的模拟电压信号;节气门体由正向和反向2只位置传感器作为控制中节气门开度反馈信号,它通过节气门体内部的一对高精度电位器获取当前开度下相应的电压反馈值,该反馈值与节气门打开角度成线性变化。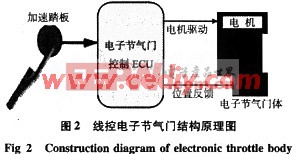
3 智能化传感器CAN总线接口设计
智能传感器接点的设计是基于Microchip公司的PIC16F877A单片机和独立CAN总线控制器MCP2510和CAN收发器PCA82C250来完成的。
PIC16F877A采用RISC指令系统的高性能8为微处理器,哈佛总线结构、低功耗、高速度。内部集成了ADC、串行外围接口(SPI)和Flash程序存储器,具有PWM输出等多种功能。PIC16F877A通过SPI接口可以实现与CAN控制器MCP2510的无缝连接。
基于PIC16F877A的CAN智能传感器节点的硬件原理图如图3所示。
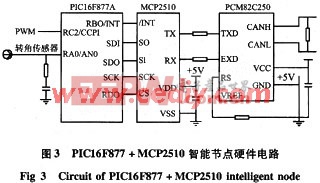
智能传感器CAN节点的通信模块由独立CAN控制器MCP2510和CAN收发器PCA82C250组成。MCP2510可以完成CAN总线的物理层和数据链路层的所有功能,支持高速SPI接口(最高数据传输速率可以达到5MB/s),支持CAN2.0A/CAN2.0B协议。CAN收发器PCA82C250是CAN控制器与物理总线之间的接口,对物理总线提供差动发送能力,对CAN控制器提供差动接收能力,同时,它可增大通信距离,提高嵌入式CAN智能节点的抗干扰能力。
PIC16F877A通过SPI与CAN控制器MCP2510连接,其串行数据输入(SDI)脚与MCP2510的SO脚相连,其串行数据输出(SDO)脚与MCP2510的SI脚相连,其串行时钟(SCK)脚与MCP2510的SCK脚相连。MCP2510的复位信号、片选信号由单片机提供。
通过设置PIC16F877A的SPI接口状态寄存器和控制寄存器使SPI接口工作于主动方式。PIC16F877A与MCP2510进行通信时的时序是非常重要的。发送数据时,先发送写指令,再发送寄存器地址,最后发送数据。当MCP2510接收到由总线传来的数据时会产生中断,单片机响应中断,读取数据时先发送读指令,再发送寄存器地址,数据会自动写入单片机SPI接口的缓冲器中。
由于单片机本身带有10位A/D转换器,因此,脚踏板位置传感器和节气门位置传感器输出的模拟信号直接接入单片机进行数模转换,不需要增加新的A/D转换装置,在图3中,传感器经由RA0/AN0输入,为了滤掉高频噪声,在模数输入口接了一个RC滤波电路。同时,电子节气门装置执行器直流电机的控制中,PIC16F877A有PWM口,通过连接驱动电路可以对直流电机进行驱动,本装置驱动器采用L298。
整套CAN总线控制网络由脚踏板智能位置传感器节点、节气门体位置传感器和执行器节点以及控制器节点组成,其中,脚踏板智能位置传感器节点、节气门体位置传感器和执行器节点由单片机CAN总线机构完成,其主要功能是向控制器传递脚踏板位置和反馈信号节气门位置信号,同时,接收控制器向执行器发出的驱动指令信号。控制器采用微机通过研华公司PCL-841卡实现CAN总线通信和相应的控制算法完成对线控电子节气门的控制。
4 系统控制原理与实验结果
系统控制流程如图4所示。
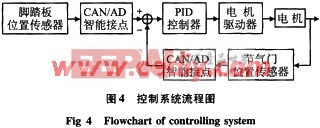
控制系统是一个闭环控制的过程,脚踏板位置传感器作为系统的输入,A/D转换后通过CAN总线发送到控制器。同样,节气门位置传感器作为反馈信号,A/D转换后通过CAN总线发送到控制器,两信号在控制器中进行比较,并由控制器采用相应的控制算法(如PID等)进行决策,决策结果由CAN总线发送到节气门体位置传感器和执行器节点,该节点微处理器产生相应的PWM信号经由驱动装置驱动执行机构的运行。
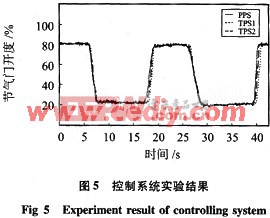
为了验证控制系统的性能,采用自适应PID控制算法进行了实验平台和实车实验,实验结果如图5。其中,PPS表示脚踏板位置,TPS1表示实验平台下节气门位置实验结果,TPS2表示实车情况下节气门位置实验结果。从控制结果来看,能够满足电子节气门控制的实时性和精度要求,同时,经过实车环境的测试,系统具有一定的抗噪能力。
5 结论
CAN总线作为一种可靠的汽车计算机网络总线已在许多先进汽车上得到应用,将CAN总线应用于智能传感器中,使传感器获得的信号能通过总线实时地、可靠地、高速而准确地进行传输,使得各汽车计算机控制单元能够通过CAN总线共享所有信息和资源,达到简化布线、减少传感器数量、避免控制功能重复、提高系统可靠性、降低成本、更好地匹配和协调各个控制系统的目的。同时,由于整个智能传感器网络采用全数字化的通信,因此,总线也具有很好的抗干扰能力,是未来智能化传感器和智能化控制网络的发展趋势。












评论