
基于单片机交通灯智能控制系统研究
1 引言
随着经济发展,汽车数量急剧增加,城市道路日渐拥挤,交通拥塞已成为一个国际性的问题。因此,设计可靠、安全、便捷的多功能交通灯控制系统有极大的现实必要性。通常情况下,交通信号灯控制主要有两个缺陷:1、车道放行车辆时,时间设定相同且固定,十字路口经常出现主车道车辆多,放行时间短,车流无法在规定时间内通过,而副车道车辆少,放行时间明显过长;2、未考虑急车强通(譬如,消防车执行紧急任务时,两车道都应等待消防车通过)。由于交通信号灯控制系统缺乏有效的应急措施,导致十字路口交通受阻,造成不必要的经济损失。
本系统利用单片机AT89C51,借助CAN总线作为现场通信总线实现智能交通信号灯控制系统设计,实现了根据区域车流、红外遥控以及PC机进行十字路口交通信号灯智能控制,并在软、硬件方面采取一些改进措施,实现了根据十字路口车流、红外遥控进行交通信号灯智能控制,使交通信号灯现场控制灵活、有效。从一定程度上解决了交通路口堵塞、车辆停车等待时间不合理、急车强通等问题。系统具有结构简单、可靠性高、成本低、实时性好、安装维护方便等优点,有广泛的应用前景。
2 设计方案与系统结构
本智能交通信号灯控制系统硬件主要由车流信息检测电路、键盘时间设置电路、红外遥控发射/接收电路、单片机控制器、CAN总线控制器、CAN总线收发器、光电隔离芯片、单片机并行接口、看门狗电路等电路组成。本系统设置与上位PC机相连的上位节点为主节点,各路口信号灯控制装置为底层节点,共同构成区域交通信号灯控制系统。系统原理框图如图1所示。
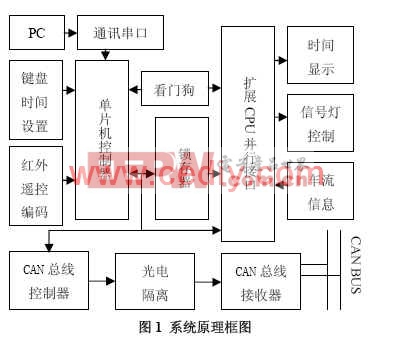
系统利用红外遥控装置实现各十字路口现场信号灯控制,红外发射器发射出的编码信号经接收器接收后送入单片机控制器,控制信号灯红绿变换、等待时间、急车强通。另外,车流检测装置安放在各十字路口东西、南北道路方向实时检测车道车流信息。并将检测到的信息输至单片机进行处理,通过单片机编程技术实现信号灯绿、红切换及等待时间设定。此外,PC机通过通讯串口与节点上的单片机控制器进行通信,实现数据信息在CAN总线上的发送与接收。PC机负责网络上所有信号灯控制装置的集中管理功能;同时向各信号灯控制器下传工作模式控制信息。













评论