
基于MSP430的小型望远镜防抖系统设计
1 引 言
本文引用地址:http://www.amcfsurvey.com/article/173594.htm防抖系统正日益广泛地应用于照相机和望远镜等光学设备中。防抖主要分为光学防抖和电子防抖,光学防抖通过光学器件进行影响稳定;电子防抖采用软件的方法,针对数字图像设计基于图像处理的影像稳定算法[1]。对于望远镜来说,在放大视角的同时,也会将手的抖动造成的影像晃动放大,在高倍望远镜中尤其明显。天文望远镜、军用望远镜等高倍望远镜在使用时通常需要配合三脚架,而大多数的手持望远镜在没有影像稳定措施的情况下观察效果受到扰动。如果观察者站在车、船、飞机上时,晃动的影响更加严重,即使把望远镜装到三角架上,也不能消除晃动的影响。因此,开发适合望远镜使用的影像稳定系统已经成为一项迫切的任务,防抖动望远镜将会具有很大的市场前景。
影像稳定属于跟踪控制问题。文献 [2]设计了一种采用形状可变的流体棱镜进行抖动补偿的方法。本文设计了以 MSP430单片机为核心的防抖控制系统,给出了系统硬件设计电路,使用 C430语言进行软件调试,以实现对望远镜防抖系统的有效控制。
2 系统硬件设计
望远镜防抖系统原理如图 1所示,其原理是:在望远镜光路中加入一组可动镜片,称为补偿镜片。补偿镜片在自身所在平面内做上下左右两个自由度的运动,来纠正因手在俯仰和偏航方向的抖动所引起的光线偏转,使光线仍然按照期望的轨迹到达目镜,从而达到稳定影像的目的。
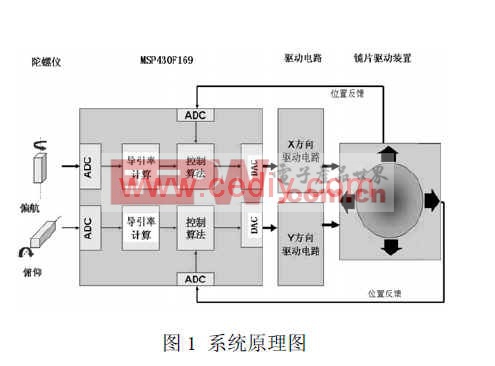
该系统硬件主要有以下几部分组成:感知望远镜抖动的陀螺仪 CG-L53B;镜片伺服直线电机的集成功率放大器 TCA0372;MCU采用 MSP430F169芯片;做电源稳压的 MAX8863芯片。
















评论