
基于单片机的智能救援机器人小车设计
摘要:设计了一种简单的基于单片机的智能救援机器人小车,设计简单,易于实现,通过现场演示,我们的设计取得了不错的结果。
关键词:单片机;智能救援;机器人小车
0 引言
近几年地震灾害频频发生,危害较大的是2008年我国的汶川大地震和今年的日本大地震,期间全世界不知又有多少危害较小的地震,这些地震带给人们的是惨痛的伤亡和巨大的经济损失。我们不能够阻挡地震事件的发生,但我们能做的还有很多,其中对伤员的救援就是一项重要的工作。
当然,灾后环境错综复杂,这对救援工具的要求是一种挑战,同时对灾后生命的探测也是一个很重要的问题。基于这两点,我们设计了一种简易的智能救援机器人小车,通过现场演示,取得了不错的效果。
1 智能小车总体框架
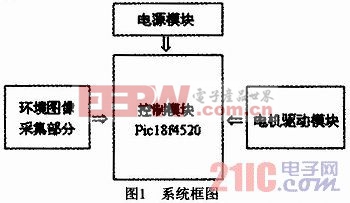
总体框架可以分为三大部分:环境图像采集部分、电机驱动部分和中央数据处理部分,系统框图如图1所示。
2 控制模块
智能救援小车最重要的部件,也就是它的大脑--中央处理系统。它不仅负责将环境图像采集部分送来的图像数据进行处理,还要将这些信息转化成为电机的驱动控制信号,使整车按照预定的规则前行,同时还要对其他一些辅助设备进行控制。这些一般单片机都可以实现,而对于行驶在错综复杂环境当中的救援小车来说,有一点很重要,那就是对外界的抗干扰能力要强,于是我们选择Microchip公司的8位微控制器PIC。该控制器除了刚才说的抗干扰能力强之外,还具有速度快、移植性好等优点。












评论