
SPMC75实现交流变频驱动控制
1 引言
本文引用地址:http://www.amcfsurvey.com/article/172207.htm系统输入电源电压为AC110V/AC220V,经全波整流后供系统使用。系统使用 Sunplus公司的SPMC75F2413A产生AC三相异步电机的VVVF控制所需的SPWM信号,并完成系统控制。使用智能功率模块实现电机的功率驱动。在AC220V输入时,系统最大能驱动1.5KW的负载。系统的变频区间为2Hz~200Hz。
2 系统框图
系统结构如图2-1所示,主要由变频电机、电源供给、IPM功率放大、IPM隔离驱动、SPMC75F2413A组成的控制核心几部分构成。
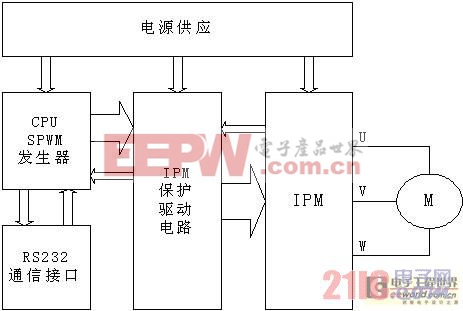
图 2-1 系统结构图
3 感应马达V/F控制
3.1 功能描述
利用SPMC75F2413A的TMR3实现AC 三相异步电机的V/F开环控制。使用DDS(直接数字频率合成)的方式产生控制所需要的三相SPWM。根据电机的V/F曲线随频率自动调整输出电压的大小。由于DDS固有的特点,在进行频率调整的过程中相位是连续的,用户可以在任何时候更改输出频率而不需关心当前的相位问题。同时,用户可以根据自己需要更换波形数据表而实现非正弦的波形输出。
3.2 设计原理
3.2.1 感应马达V/F控制原理
在电机调速时,最重要是要保持磁通为额定值不变。在直流电机中,励磁系统独立,只要对电枢进行合适的补尝,保持不变很容易。而在交流异步电机中,磁通是定子和转子的磁势合成的。而且满足:
(3--1)
式中:
--气隙磁通在定子每相中的感应电动势的有效值;
--定子频率;
--定子每相绕组的串联匝数;
--基波绕组系数;
--每极气隙磁通量;
由式(2--1)可知,只要控制好和,便可达到控制磁通的目的,为此,得考虑基频以下和基频以上两种工作情况。
1.基频以下调速
由式(2--1)可知,只要保持为常值,就可以保持不变。但是,绕组中的感应电动势是很难直接控制的,在电动势较高时可以忽略定子绕组的阻抗压降而认定,则有 = 常值;在低频时和都比较小,这时不能忽略,可以人为的抬高去补尝定子绕组的阻抗压降。
2.基频以上调速
当基频以上调速时,频率往上升高,但却不能比额定电压还要大,顶多只能使 =。因此,由式(3--1)可知,这将迫使磁通与频率成反比,相当于直流电机弱磁升速的情况。
将以上二种情况结合起来就可以得到异步电机如图 3-1所示的变频调速特性。同时这也是变频电机调速的V/F曲线图。在实际运用中,V/F开环控制也是沿着这条曲线进行的。
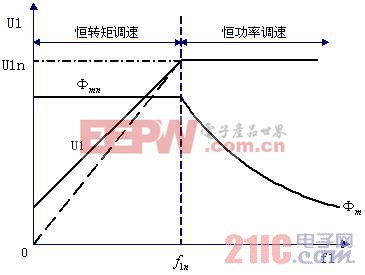
图 3-1 三相感应电机的V/F曲线
3.2.2 正弦波生成原理
要使三相感应马达正常运行,需要使其电枢绕组通以三相交变电流,以产生圆形旋转磁场。产生三相交变电流的方法有很多,本例中使用SPWM来产生三相正弦电流。图 3-2 是三相SPWM生成原理
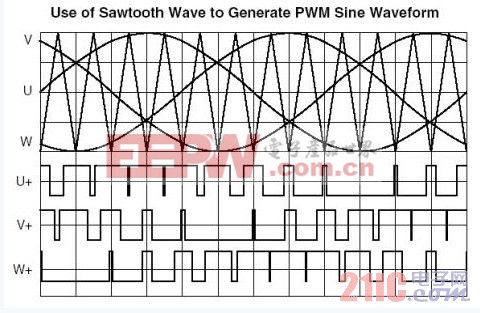
图 3-2 三相SPWM生成原理
本例使用DDS(直接数字频率合成)的方式产生SPWM。如图3 -3 所示,整个系统是一个典型的DDS频率合成系统,只不过用PWM发生模块去替换了传统的DAC。在本系统中波形数据表的大小为1024点,PWM载波频率为10KHz。波形数据表取1024点一是为了计算方便,因为在相位累加后查表的过程中有一个相位截取的操作(我们的相位累加器是16位的,而波形数据表是1024点--10位),为了加快这一处理过程,选用以大小的表有利于加快处理过程,以尽量节约CPU的运算时间。同时当波形数据表为1024点时,波形发生过程中的理论的最大相位误差这样加上软件处理过程中引起的一些相位抖动,最大的相位误差也不会超过。同时,在三相同时产生时,由于表的大小是,不是3的整数倍,因此代表和相位差的常数会有的误差,会使三相之间的相位关系不是整好的和,但误差不会超过。还有,较大的数据表有利于保证低频时的波形精度。
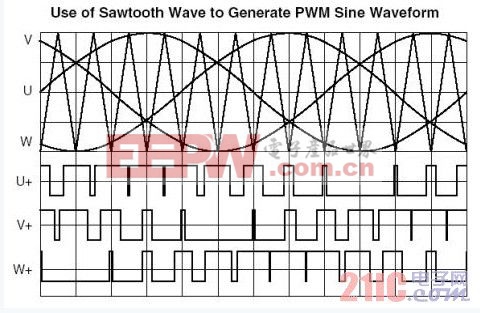
图 3-3 三相SPWM生成原理图
注意:本例所讨论的一些公式都是保证波形的幅度精度比相位精度高情况。实际上,当幅度精度变差时,相位误差会变大。本例中的波形数据表不限于标准的正弦表,用户可以根据自己的需要决定自己的波形。如加入三次谐波的增强型波形等。在V/F控制中,当频率比基频低时,调制系数小于1,有效样点数会比实际样点数少,因为幅度调制使波形的幅度分辩率下降,会出现样点重复的情况。因此,建议用户在低频时提高 PWM的分辨率。
4 软件说明
系统的软件部分主要是完成AC变频马达的V/F开环变频驱动功能,主要包括SPWM发生的中断服务函数,DMC通信协调等几个部分。
4.1 主流程与说明
主程序在完成系统初始化以后,就不断检测有没有来自PC的控制信息,如果有便完成相应的控制功能,没有就继续检测。
主程序主要完成各个模块的初始化,而后便监视UART的数据接收情况,如果收到了有效的波形参数数据,则调用SPMC75_SPWM_VF_account (unsigned int F,unsigned int Kvf,int Moto) 对波形参数进行预置更新,而波形数据将在预置更新完成后的第一个PWM周期中断中完成波形数据更新操作。主程序流程如图 4-1所示。
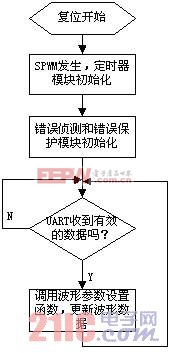
图 4-1 主程序流程
4.2 中断子流程与说明
进入PWM的周期中断片后,程序首先判断有没有新的波形参数设置,如果没有就直接进入DDS频率合成,如果有则先更新波形参数(相位增量和幅度调制系数),而后进入DDS频率合成。DDS合成是在每一次PWM的周期中断,波形相位在原相位的基础上加上用户设置的相位增量值N(这个值正比于波形频率),而后查出这个相位所对应的幅度值,同时还查出距这个相位120度和240度的二个相位对应的幅度值,最后将这三个值分别乘以幅度调制系数AM后送入PWM产生模块产生相应占空比的PWM信号。其流程图如图 4-2所示。
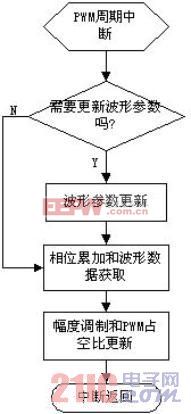
图4-2 TMR3周期中断服务流程












评论