
LED模组在线检测设计
摘要:在项目实践基础上,使用机器视觉技术,对采集的图像采用中值滤波窗口滤除采集过程中的脉冲及椒盐噪声;使用自适应大津法分割图像,在对单元扳在线检测时,由于工作台振动造成模组摆放位置与标准模板位置产生偏差,可采用Fomier-Mellin法进行图像配准,并对配准结果进行双线性插值法处理,结果表明,该方法能精确确定图像分割时的阈值,配准结果满足工厂检测要求,适用于工业现场快速实时测量系统,具有较高的推广价值。
关键词:在线检测;大津法;双线性插值;Fomier-Mellin;中值滤波
LED显示屏产业现已成为新兴的高科技产业,在各终端设备中已经被广泛使用,如广告牌,文字显示器,大屏幕视频显示器等。显示屏显示效果的好坏直接取决于发光模组质量的高低,LED拼接显示屏技术作为实现大屏幕的一种方法已经得到了极大的推广应用,LED模组作为组成LED显示屏的主要部件,在制造、使用和性能评定时均需要对其进行快速准确的测量和分析。国内对LED单元板的检测在很大程度上依靠人工完成,使得检测速度和质量受个人主观因素影响较大,结果凸显出来的问题就是发光模组的发光亮度、色度不一致性过大,使得拼接出的显示屏不可避免的出现“马赛克”现象,极大的影响显示屏的显示效果,直接降低显示屏的产品质量和档次。文中针对该问题并根据厂家实际的需要,利用机器视觉技术,将其融入到对LED单元板的检测过程中,实现了一种快速高效价格低廉的LED单元板检测系统。
用于模组的检测设备总体由显示屏驱动控制单元、工作台、CCD图像传感器、图像采集卡、PC机等组成,如图1所示。选用64颗LED组成的8x8点阵LED模组作为检测模板,如图2所示。
1 检测系统算法流程
在机器视觉系统中,视觉信息的处理主要依赖于图像处理,其包括图像增强、数据编码传输、平滑处理、边缘锐化、图像分割、特征抽取、图像识别和理解等。根据具体应用要求在这些过程中进行折中选择。处理后,输出图像的质量会得到相当程度的改善,便于计算机对图像进行分析、处理和识别。根据需求设计的主要算法流程如图3所示。

2 图像去噪
在图像的获取、采集和传输过程中,由CCD输入转换器件及周围环境等因素,检测系统中采集的数字图像不可避免的含有各种各样的噪声和失真。大量的实验研究发现,由摄像机拍摄得到的图像受离散的脉冲、椒盐噪声的影响比较严重。中值滤波是应用极为广泛的一种非线性滤波方法,它能有效去除脉冲噪声、椒盐噪声同时又能保留图像边缘细节,由于其不依赖于领域内那些与典型值差别很大的值,故可以克服线性滤波器滤波带来的图像细节模糊,它是一种不同于卷积的邻域计算,其处理原理是(按3x3模板),将滤波模板内的9个像素的灰度值由小到大排列(或是由大到小排列)之后,按其排列顺序选取第5个位置上的像素的灰度值(中值)作为滤波后该像素点上的灰度值。分析可知,中值滤波滤除噪声的性能与滤波窗口的大小直接相关,小的滤波窗口可以较好的保持图片细节,但不能有效的去除脉冲噪声;较大的窗口能更好地抑制噪声,但会使图像变得模湖。文中选用3x3处理窗口,采集图像中最上、最下、最左、最右的所有像素点都无法进行滤波,但在实际检测过程中这些点都位于图像边缘,属于背景色不需检验。
3 图像分割
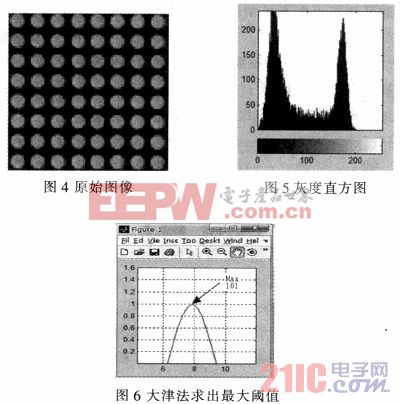
图像分割是由图像处理转到图像分析的关键,其目的就是把图像分割成若干特定的、具有独特性质的区域并提取出感兴趣的目标。为了减少由于二极管发光不均匀性带来的影响,文中采用自适应门限处理技术,将图像分为4个相同大小的区域,并对每个部分的阈值用大津发单独进行计算。大津法基本思想为:记t为区域内部前景与背景的分割阈值,前景点数占图像比例为α0,平均灰度为β0;背景点数占图像比例为α1,平均灰度为β1,图像的总平均灰度为β=α0xβ0+α1xβ1。从最小灰度值到最大灰度值依次遍历t,当t使得类间方差值g=α0x(β0-β)+α1x(β1-β)最大时,t即为分割的最佳阈值。方差作为灰度分布均匀性的一种度量,其值越大,即可说明构成图像的两部分差别越大。当目标错分为背景或背景错分为目标时都会导致两部分差别变小。因此,使类间方差最大化的分割意味着错分概率最小。直接应用大津法计算量很大,在使用时采用了g的等价公式g=α0xα1x(β0-β)。原始图像如图4所示,灰度直方图如图5所示,大津法求出最大阈值如图6所示。











评论