
第八届智能车竞赛全国总决赛首日总结现场图
第八届全国大学生飞思卡尔杯智能汽车竞赛全国总决赛8月22日在哈尔滨工业大学举行。在首日的争夺中,三个组别来自110所高校的167支队伍参与竞速赛的角逐,最后每个组别决出前22名进入明天的总决赛,争夺全国总冠军。其中北京科技大学的三个组别代表队拿走了各个组别的预赛第一,明天的总决赛将在最后出发。而在创意赛中,来自安徽工业大学、北京邮电大学、同济大学、东南大学和广东技术师范学院的代表队赢得评委的青睐杀入决赛,明天将现场演示自己的创意作品。飞思卡尔杯国际智能车挑战赛也于22日举行,北京科技大学代表队以较大优势代表中国拿下首届国际赛冠军,明年他们将受邀参加FTF,来自马来西亚和中国台湾的队伍分获二三名。

国际赛的赛道
首日比赛,值得关注的地方很多,比如斯洛伐克代表队利用国际赛的赛程特点,很可能采用了赛道记忆技术让两次比赛的成绩提升很大,但还是没有杀入前三,这个仅在第一届全国比赛中使用并帮助清华夺走首届冠军的技术,虽然可以快速提升比赛成绩,但是系统不够稳定,而且也会在一定程度上影响赛车的速度,而且国内赛的赛制已经没有任何施展该技术的空间。
稳定性和速度上,今年立起来的光电组因为选择了和另外两个组别一样的赛道,所以成绩满了很多,而稳定性从全国预赛的现场成绩看,比去年立起来的电磁组的稳定性还差,不过更大的原因还是赛道的难度较去年单独电磁赛道更大的原因。因为,今年光电的赛道还有了坡道和一个小障碍,即使如此,绝大部分队伍没有在这两个比较难的地方摔倒,而是在频繁转弯的地方出错,一方面可能与现场的光线影响有关系,另一方面确实平衡性还是个问题。
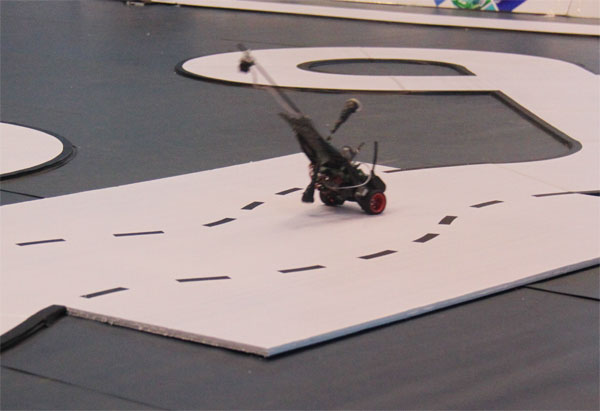
光电组直立赛场过双虚线连续S弯
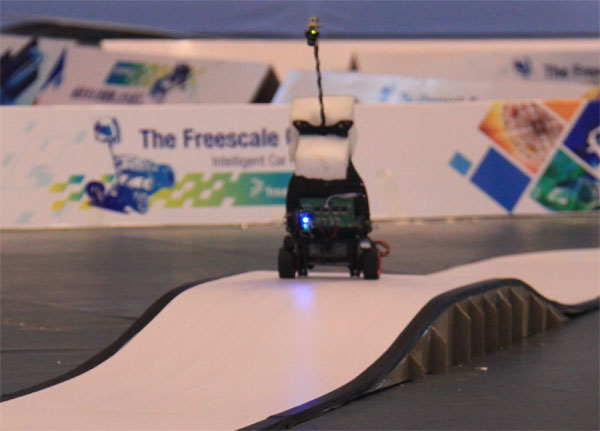
直立的光电赛车过坡道
电磁组今年最简单,四轮正向前进,几乎速度和稳定性都是三组里最好的,而无论是连续弯道还是坡道以及新加的连续障碍都没有造成任何麻烦。
电磁组的赛场过连续障碍,因为车轻速度快还是有些飘
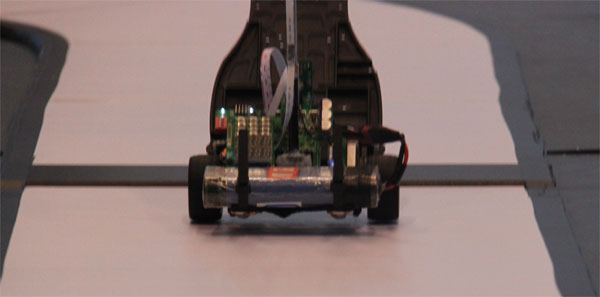
摄像头组的变化是最有趣的,原本最快的摄像头,因为倒着跑所以有了更多的变化。首先,赛前争议不断的虚线连续弯没有对选手造成任何障碍,反而因为有背板的存在,所以笔者看了很多组比赛,无论摄像头还是光电组都没有人因为这个环节出问题。其次,很多队伍的急弯处降速明显,之前摄像头组经常是为了追求速度而在弯道很深了才降速,现在因为车模前后轮不变,而倒向前进,驱动依然是原有的后轮驱动前轮控制方向,所以现在的摄像头组在切弯前需要降速以保证过弯的稳定性。最后,摄像头组的选手很少有在前轮附近配重的以平衡稳定性,看了大部分车模,笔者只发现两支队伍选择了前轮配重,提升稳定性。


两辆我发现配重的摄像头赛车
光电组直立赛车挑战单障碍

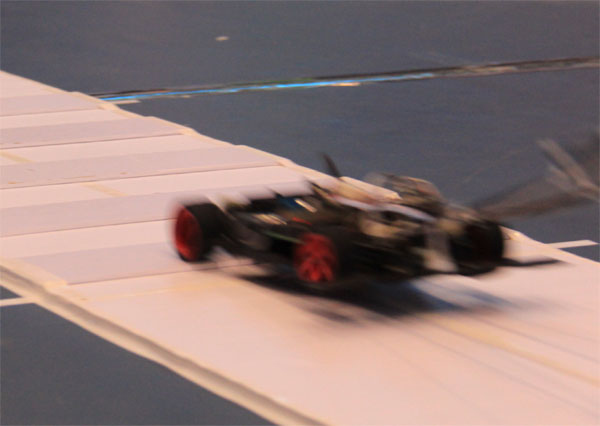
飞起来的摄像头赛车
首日的创意赛决赛,选手主要根据命题进行两车搜救五个路标的方案,设计根据两种以上无线技术的智能车路径选择方案,但是从创意赛的比赛实际情况看,无线技术的稳定性还稍差,而且选手今年的创意发挥的空间不大,所以大家的方案都比较类似,比较有意思的是有些选手做的监控系统和操作软件比较有特点,特别是手机平台的应用比较有代表性。

同济大学的创意赛

专家组跟选手讨论赛车问题





















评论