
微机械惯性传感器检测平台的设计与应用
摘 要: 一种用于微机械惯性传感器研制与开发的检测平台,介绍电容式惯性传感器微电容信号的检测原理、该系统的总体结构、各个组成部分的工作原理及自动检测方法。
本文引用地址:http://www.amcfsurvey.com/article/163896.htm关键词: 微机电系统(MEMS) 微机械陀螺(MMG) 检测
随着科学技术的发展,许多新的科学领域相继涌现,其中微米/纳米技术就是诸多领域中引人注目的一项前沿技术。20世纪90年代以来,继微米/纳米技术成功应用于大规模集成电路制作后,以集成电路工艺和微机械加工工艺为基础的各种微传感器和微机电系统(MEMS)脱颖而出,平均年增长率达到30%。微机械陀螺是其中的一个重要组成部分。目前,世界各个先进工业国家都十分重视对MMG的研究及开发,投入了大量人力物力,低精度的产品已经问世,正在向高精度发展。
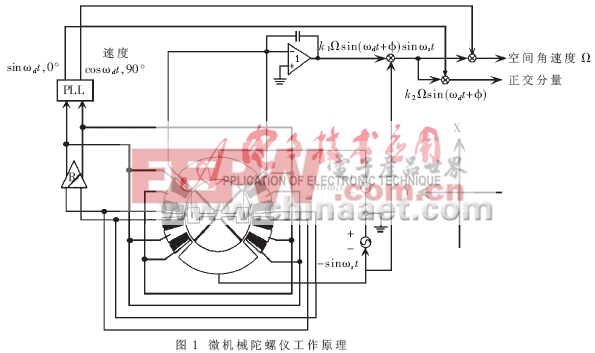
1 微机械振动陀螺仪的简要工作原理
陀螺系统组成见图1,它由敏感元件、驱动电路、检测电路和力反馈电路等组成。在梳状静电驱动器的差动电容上分别施加带有直流偏置但相位相反的交流电压,由于交变的静电驱动力矩的作用,质量片在平行于衬底的平面内产生绕驱动轴Z轴的简谐角振动。当在振动平面内沿垂直于检测轴的方向(X方向)有空间角速度Ω输入时,在哥氏力的作用下,检测质量片便绕检测轴(Y轴)上下振动。这种振动幅度非常小,可以由位于质量片下方、淀积在衬底上的电容极板检测,并通过电荷放大器、相敏检波电路和解调电路进行处理,得到与空间角速度成正比的电压信号。
在科研及加工过程中,一个重要的内容就是检测陀螺仪的特性,如工作状态谐振频率、带宽增益、Q值等,于是就提出了微机械惯性传感器检测平台的研制任务。根据陀螺仪的工作原理,整个仪器包括两大部分:驱动信号发生部分和表头的输出信号检测部分。驱动信号发生部分对待测的惯性传感器给予适当的驱动信号,使传感器处于工作状态。信号检测部分要求检测出微小电容变化,经过放大、解调处理后,将模拟量转换成数字量采集到PC机中,分析输出信号,以确定惯性仪表的特性。
2 微电容检测技术
在MMG检测技术中,利用电容传感器敏感试验质量片在哥氏力作用下的振动角位移,获取输入角速率信号。由于陀螺仪的尺寸微小,为了得到10°/h的中等精度,要求电容测量分辨率达到(0.01×10-15)~(1×10-18)法拉。因此,对于微机械加速度计和微机械陀螺仪来说,检测试验质量和基片之间的电容变化是一个关键技术。目前在MMG中采用的微电容检测方案有三种:开关电容电路、单位增益放大电路和电荷放大电路。
2.1 开关电容电路
其基本原理是利用电容的充放电将未知电容变化转换为电压输出。该测量电路包括一个电荷放大器、一个采样保持电路以及控制开关的时序,如图2所示。
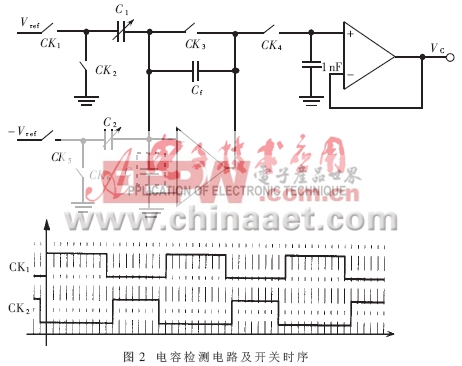
在测量过程中,先将未知电容(C1、C2)充电至已知电压Vref,然后让其放电。充、放电过程由一定时序控制,不断重复,使未知电容总处于动态的充放电过程。C1、C2连续地放电,电流脉冲经过电荷放大器转换为电压。再经过采样保持器,得到输出Vc。将公式ΔC=2C0・x/d0代入,可得电容检测电路的传递函数为:












评论