
基于数字技术的雷达恒虚警电路设计与实现
0 引言
恒虚警率(constant False―alam Rate)简称CFAR,是雷达信号处理的重要组
成部分。雷达信号的检测总是在干扰背景下进行的,这些干扰包括接收机内部的热噪声,以及地物、雨雪、海浪等杂波干扰,还有敌人施放的有源和无源干扰。当雷达遭受干扰或接收机热噪声太强时,用显示器观察就会在画面上出现很多亮斑,以至于不能发现真正的信号。为了解决这个问题,在雷达自动检测系统中,要设置一定的门限。如果干扰电平增加,将大大增加虚警,使后面的计算机过载。本文介绍的是针对接收机内部噪声电平进行处理的恒虚警电路。接收机内部噪声是由于温度、电源等因素而改变而产生的,其变化是缓慢的,因此这种处理是慢门限恒虚警处理。慢门限恒虚警电路分闭环式和开环式,本文主要介绍闭环式噪声电平恒定电路的数字实现方法。
1 闭环和开环式噪声电平恒定电路原理
雷达接收机检波后噪声电压的概率密度函数服从于瑞利分布,云雨、海浪和地物杂波在检波后的电压概率密度分布也符合瑞利分布: 根据瑞利分布计算出超过门限V2T的虚警率:
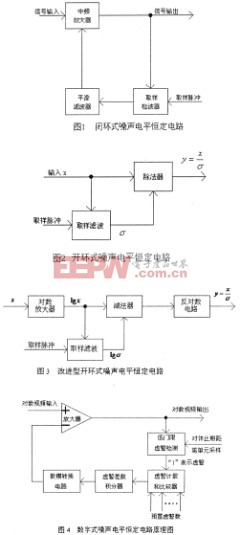
根据瑞利分布计算出超过门限V2T的虚警率: 式中V0=VT/σ,为相对门限电压。当门限VT确定后,由于噪声电平的变化,将明显改变虚警率。噪声电平恒定电路可以采用类似接收机自动增益控制电路的办法。图l为闭环式噪声恒定电路原理框图。由于雷达在工作时,接收机输出除噪声外还有信号和地物杂波登干扰,所以对噪声的取样应在休止期(接近纯噪声区)里进行,将噪声取样值检波后送低通滤波器平滑,然后将平滑后的噪声电压送去控制中频放大器增益。该电路可以有效地达到噪声恒定。原理如下:由瑞利分布函数
式中V0=VT/σ,为相对门限电压。当门限VT确定后,由于噪声电平的变化,将明显改变虚警率。噪声电平恒定电路可以采用类似接收机自动增益控制电路的办法。图l为闭环式噪声恒定电路原理框图。由于雷达在工作时,接收机输出除噪声外还有信号和地物杂波登干扰,所以对噪声的取样应在休止期(接近纯噪声区)里进行,将噪声取样值检波后送低通滤波器平滑,然后将平滑后的噪声电压送去控制中频放大器增益。该电路可以有效地达到噪声恒定。原理如下:由瑞利分布函数 可知,如果引入新变数y=x/σ,则y的概率密度函数为:
可知,如果引入新变数y=x/σ,则y的概率密度函数为: 该式表明,变数y的概率分布与噪声强度无关,如能将变量x归一化为变量y,则噪声强度变化时将保持输出恒虚警。因此,必须设法检测出噪声x的均方差σ值,通过相应的设备完成x和σ的相除,即可达到归一化的结果。瑞利分布噪声的平均值正比于检波前高斯噪声的均方差,即当
该式表明,变数y的概率分布与噪声强度无关,如能将变量x归一化为变量y,则噪声强度变化时将保持输出恒虚警。因此,必须设法检测出噪声x的均方差σ值,通过相应的设备完成x和σ的相除,即可达到归一化的结果。瑞利分布噪声的平均值正比于检波前高斯噪声的均方差,即当 时,统计平均值
时,统计平均值 在闭环控制电路中,平滑滤波相当于对随机变量取平均值,只要滤波器时常数足够大,就可得到较满意的结果,增益控制等效于取归一化。噪声恒定电路也可以做成开环,如图2所示。该电路实现比较复杂,因为无论用模拟或数字技术实现除法都比较困难。因此在开环式噪声恒定电路中,常采用增加对数放大器和反对数电路,如图3所示。
在闭环控制电路中,平滑滤波相当于对随机变量取平均值,只要滤波器时常数足够大,就可得到较满意的结果,增益控制等效于取归一化。噪声恒定电路也可以做成开环,如图2所示。该电路实现比较复杂,因为无论用模拟或数字技术实现除法都比较困难。因此在开环式噪声恒定电路中,常采用增加对数放大器和反对数电路,如图3所示。
2 虚警率pfa与取样值N的关系









评论