
基于LM3S8962 ARM的神经元控制直流调速系统
1 控制系统的控制方案
本文引用地址:http://www.amcfsurvey.com/article/163823.htm系统控制框图如图1所示,采用串级控制,分为转速环(外环)和电流环(内环)。为了提高系统响应的快速性和限流的必要性,电流环仍采用传统的PI调节器,而转速则采用神经元控制器,以提高其鲁棒性。
 |
2 单神经元PSD自适应控制算法
单神经元自适应PSD算法控制框图见图2。
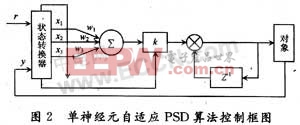 |
图2中状态转换器的输人为设定值r(k)和过程输出y(k),转换器的作用是获得单神经元的三个输入量x1(k),x2(k),x3(k),在这里:
 |
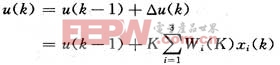
其中:Wi(k)(i=1,2,3)为对应于神经元输入xi(k)的加权系数。
控制器总输出为:
 |
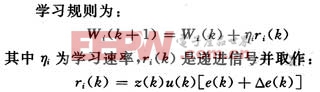 |
z(k)为教师信号,在这里取z(k)=e(k)。这是因为控制效果主要与e(k)和△e(k)有关。为了保证学习算法的收敛性和控制的鲁棒性,一般采用规范化学习算法以构成单神经元PSD控制规律,所以单神经元自适应PSD的控制算法如下:
|
相关推荐技术专区 |













评论