
基于MPPT技术的太阳能发电的路灯控制系统
1 硬件组成
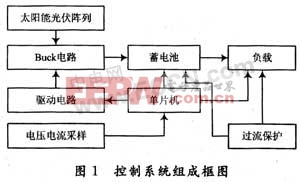
本文引用地址:http://www.amcfsurvey.com/article/163665.htm太阳能路灯控制系统的组成如图1所示。
1.1 Buck电路及其驱动电路
Buck电路工作原理是通过斩波形式将平均输出电压予以降低,可以将输入接在光伏电池输出端,通过调节其输出电压来达到调节负载之目的,以保持光伏阵列输出电压在其最大功率点的电压和电流处。这里控制目标是输出功率为最大,调节手段是改变开关管的开通占空比。由于光伏阵列的软特性,并不是简单的增大开关管占空比就能增大光伏阵列输出功率。当Buck电路负载为蓄电池时,其构成了蓄电池充电电路,将蓄电池直接接在Buck电路的输出端,通过调节蓄电池的端电压实现蓄电池的充电控制,使用单片机智能控制方法,可以实现蓄电池的智能化充放电控制。
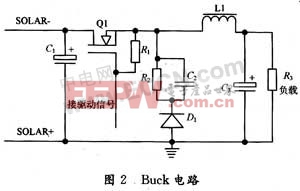
Buck电路为主电路,如图2所示,太阳能光伏阵列输出额定电压为35 V,输出额定电流为4.65 A,蓄电池额定电压为24 V,开关频率为80 kHz。电路工作在电流连续模式时电感量:
允许的纹波电流△I越小,即k越小,电感L越大,电流纹波越小,可以选择较小的滤波电容;反之,电感L较小,但电容较大。一般选取k=0.05~0.1。
将电感值确定以后,实际电感器的设计必须符合相关电气标准、系统尺寸和安装方式等限制。许多磁性元件供应商均提供各种型号的标准产品,可满足绝大多数的设计标准要求。
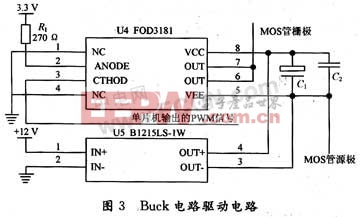
Buck电路为实现最大功率技术的主电路,采用C8051F330单片机进行控制,采用有效的算法通过软件编程由单片机输出不同占空比的PWM信号,经由U4,U5处理,如图3所示,驱动开关管Q1的导通与关断。由于单片机C8051F330的驱动电流太小,且Buck电路中MOS管与主电路不共地,故采用隔离作用的B1215LS和输出电流为0.5 A的高速光电耦合的MOS门驱动FOD3181,满足MOS管工作的要求。
1.2 单片机控制电路
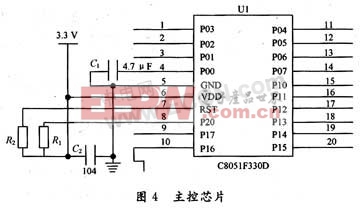
C8051F330(如图4所示)的P0.2为太阳能光伏阵列的电压采样信号输入,P0.3为蓄电池电压采样值的输入,P0.5为主电路中电流信号采样值的输入,P1.6为温度传感器值的输入,P0.6为8位PWM信号输出,P0.4输出控制负载的接入及过流时对电路的关断,P1.0~P1.4接拨码开关,为路灯设置定时,其定时长短由拨码开关的状态决定,四位拨码开关共24=16个状态,分别可定时1~16个小时。
2 电 源
3 软件设计
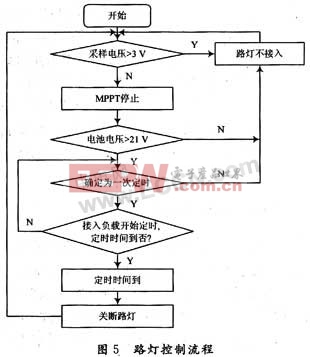
整个系统的控制流程如图5所示。
4 结 语
经实际运行表明,该控制系统具有电路结构简单、工作稳定可靠、实用性强等优点,较好地将太阳能光伏技术与路灯控制技术结合起来,并实现了智能控制。












评论