
基于CAN总线的阀门远程控制系统
普通电动阀门是一种通用的执行单元,它作为一种重要的执行器件广泛地用于工业流程控制领域,具有不可替代的作用。阀门电动装置是以电机为动力,带动机械减速装置将动力传给阀门,实现阀门开启和关闭的最终部件,它是电动阀门中的核心部分。近年来,国内生产电动阀门的厂商通过对国际先进技术的引进和吸收,以及与Limitorque、Rotork等国际著名企业的合作,已经逐步掌握了机械传动、制造等一些核心技术,加之价格方面的优势,取得了国内市场的主导地位。随着工业自动化水平的提高,尤其是现场总线技术的出现,仅有现场操作以及简单的点对点控制功能的电动阀门越来越难以满足市场需要,国外各大公司纷纷推出现场总线电动阀门产品,但价格高昂。因此,提高我国电动阀门的自动化水平,对国内的电动阀门产品加以改造,推出自己的现场总线产品,提高产品的竞争力,巩固国内市场并能逐步参与国际竞争对于加入WTO的今天有着重要的意义。
本文引用地址:http://www.amcfsurvey.com/article/163635.htm现场总线是应用在制造或过程区域现场装置与控制室内自动控制装置之间的数字式、串行、多点通信的数据总线。它也被称为开放式、数字化、多点通信的底层控制网络。现场总线的出现为工业自动化提供了全分布的解决方案,提高了现场设备的智能和自治水平,便于系统的安装和维护。现场总线的种类很多,国际标准的现场总线就有13种之多,其中CAN总线以其支持多主方式,卓越的短帧传输性能,极高的可靠性,非破坏性总线先级仲裁方式,Intel、Philips、Motorola等众多半导体生产厂商的芯片支持,以及相对简单的开发手段和低廉的开发成本,使其成为国内现场总线开发的热点。本文研究的基于CAN总线的阀门控制系统就是将微控制器技术、CAN技术应用于国产通用型电动阀门中,同工业控制计算机一同构成的阀门远程控制系统。
通用型阀门对控制精度要求不高,操作也较简单,仅有开、关、停三种状态。通常情况下,操作人员在现场通过对阀门上控制器的操作来控制阀门的开启和关闭,阀门的开度通过阀门上的指针式仪表指示。出于保护的需要,控制器在电气控制上实现了阀门故障状态下的停机功能,但是对故障的诊断只能依靠操作人员的经验,甚至需要开盖检查,给维护带来不便。
本文提出的远程阀门控制系统包括上、下位两级控制,除了保留原有的现场操作功能外,操作人员还可以通过上位机对阀门进行远程操作。上位机提供操作方便的人机交互界面,支持对系统中不同阀门的简单组态,并采用数据库技术实现系统运行中各阀门的状态信息和故障信息的管理,便于系统的维护,上位机除了具有与下位机通信的现场总线接口外,还应具有以太网接口以实现系统与外部的信息交互。下位机在尽量保留原有的电动装置电气结构的前提下,引入了微控制器技术,构成嵌入式控制系统,既支持现场的操作,也支持上位机的远程控制,二者可以通过现场的开关进行切换。下位机控制系统中增加了检测电路和现场总线接口,实现了阀门运行中大量故障信息的采集。
微控制器一方面能按现场或上位机设置的阀门开度值控制阀门的开启和关闭,另一方面可以响应上位机的数据请求,将阀门的运行信息上传给上位机。上位机、下位机之间通过现场总线连接,二者分工明确,构成真正的全分布现场总线控制系统(FCS)。
根据以上分析,本文采用了集中管理、分散控制的上、下位机两级控制的系统总体结构,如图1所示。
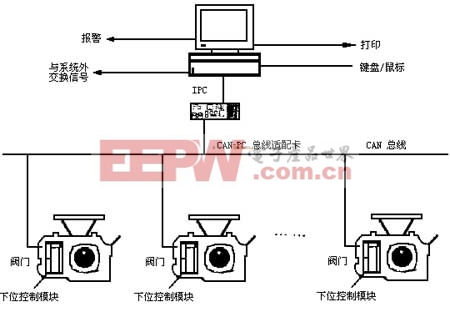
上位机采用工业控制计算机,除上面提到的功能外,还设计了运行信息统计打印以及系统报警等功能;下位机是以微控制器为核心的控制单元,并嵌入到阀门中,与阀门的电气控制部分一同实现控制功能。系统通信选用的是CAN总线,CAN总线协议简单,仅包括物理层和数据链路层,用户可以自己定义应用层,传输介质可以采用屏蔽的双绞线,信号传输采用短帧结构,每一帧的有效字节数为8个,传输时间短,受干扰的概率低。总线通信速率最高可达1Mbps/40m,直接传输距离最远可达10km/5Kbps,总线上可挂接设备数最多可达110个。当某个节点严重错误时,能够自动脱离总线,有关CAN总线技术的文献较多,在此不作详述。在本文提到的远程阀门控制系统中采用CAN总线是因为阀门控制功能逻辑简单、信息量小,并结合CAN总线数据的传输速度、开发的难易程度、技术支持和成本等多方面的考虑。
2上位机设计
系统上位机硬件选用研华工控机IPC-6718V,配以研华的双端口CAN接口卡PCL-841,性能稳定,大大缩短了系统的开发周期。上位机软件采用VB610来设计,便于实现用户需要的各种监控功能。
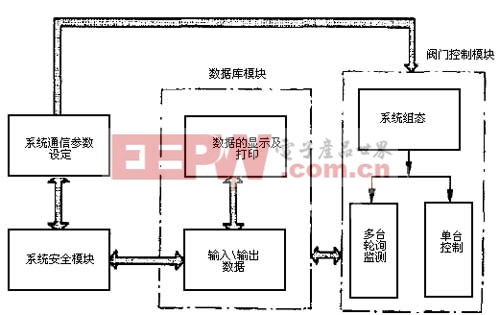
上位机软件包括系统安全模块、系统通信参数设定模块、数据库模块和阀门控制模块等几个部分。图2给出了上位机各个软件模块之间的关系,从图可以看出上位机软件不仅实现了阀门控制功能,而且充分考虑了作为一个控制软件所需要的系统安全以及数据库操作。其中,阀门控制模块是上位机软件的核心。
上位机软件的主要功能是实现对整个系统内各阀门状态的监控以及提供用户对现场阀门的远程控制操作。上位机软件启动后,首先进行系统的初始化,之后进入系统监控运行模式,如果是初次应用,初始化后还要根据系统的具体情况进行组态。在运行模式下,上位机与下位阀门控制单元采用一问一答的方式进行信息交换,上位机对每台阀门返回的各种状态和故障信息进行分析后刷新数据库中的相应数据,并刷新主监控界面上的相应部分。由于主监控界面上的阀门较多,仅能简单地示出每个阀门的基本运行状态(启动、停止、故障)和开度,如果要查看某个阀门的详细运行信息,可以通过点击界面上的阀门图标切换到该阀门的单台监测界面,这时除了可以给出阀门当前的开度、开关停状态等基本信息外,还可以示出电机缺相、转越限、电机过热等报警、故障信息。图3给出了这一过程的软件流程。
为了提高远程控制时的响应速度,上位机设计了系统中单台阀门的远程控制功能,这种工作模式下,用户将要求的阀门开度通过CAN总线下传给相应阀门中的下位机,由下位机控制阀门的启动和停止,并将整个过程的运行状态实时传给上位机。在实际应用中,如果系统中不同的阀门有联动要求,也可以通过上位机编程实现。
3下位机设计
阀门的动作是由嵌入到阀门中的下位机控制的,下位机在接收到指定开度的命令后将分析此时阀门的运行情况和各种状态,如果此时阀门处于允许动作的状态,下位机则发出分析后的指令(开或关),待阀门开度到达指定开度时,执行停机操作。下面将从硬件、软件两个方面对下位机设计进行较详细的说明。
3.1下位机硬件设计
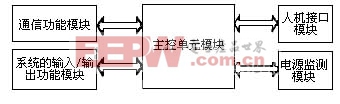
下位机是具有“自治”功能的单片机控制系统,在原有的电气控制电路基础上增加了故障信号的采集和对外通信的CAN总线接口。下位机电路从结构和功能上可以分为主控单元模块、电源监测模块、数据采集及控制接口模块、人机接口模块、总线通信模块。它们之间的关系如图4所示。















评论