
CAN总线在液压支架电液控制系统的应用
液压支架电液控制系统是实现综采工作面高产高效的关键技术设备。当前国际上主流的液压支架电液控制系统有:DBT公司的PM4、MARCO公司的PM31和JOY公司的RS20型3种。在通讯方面,PM4架间通过BIDIBus互联成综采面网络。这种方式的缺点在于,一旦控制器不能正常工作,将导致控制系统通讯的中断。PM31架间的通讯通过BIDIBus,全工作面的互联则采用TBus。RS20控制器间通过一条19芯强电缆连接,其中的8根线用于通讯和紧急闭锁。可以看出,PM4与PM31都采用总线的方式进行通讯,但都不是标准的现场总线。通过对3种控制器的剖析发现,它们的技术思路形成较早,且产品一直延续着早期形成的思路。而现场总线的提出相对较晚。与现场总线方式相比,早期的技术思路存在着如下几点缺陷:实现复杂,需要消耗较多的系统资源;没有提供可靠高效的通讯协议,数据的错误检测和出错重发完全靠用户编制的软件实现,网络的错误处理能力不强。为了保证通讯的准确性和系统运行的可靠性,就必须编制完善的调度程序和通信协议,这就增加了系统开发的难度和开发周期。采用现场总线技术则可较好的解决上述问题。
CAN(ControllerAreaNetwork)即控制器局域网络,是一种标准的现场总线。由于其高可靠性、灵活性以及独特的设计,CAN总线越来越受到人们的重视并被广泛的应用于航海、航空、医疗及工业现场领域。CAN总线的特点可以概括如下:
(1)通信方式灵活。CAN既可以采用多主方式,也可以采用单主多从的方式。
(2)CAN总线采用非破坏性仲裁技术,当多个节点同时向总线发送信息时,优先级较低的节点会主动的退出发送,而最高优先级的节点可不受影响的继续传输数据,从而大大节省了总线冲突仲裁时间。
(3)通过报文滤波即可实现点对点、点对多点及全局广播等几种方式传送接收数据,无需专门的“调度”。
(4)CAN的直接通信距离最远可达10km(传输速率5kb/s以下);通信速率最高可达1Mb/s(通信距离最长为40m)。
(5)CAN上的节点数主要取决于总线驱动电路,目前可达110个;报文标识符可达2032种(CAN2.0A),而扩展标准(CAN2.0B)的报文标识符几乎不受限制。
液压支架电液控制系统是一种分布式控制系统。而CAN总线自身的特点使CAN总线能够有效的支持分布式控制。结合CAN总线在分布式控制系统中的成功应用以及液压支架电液控制系统的特点,将CAN总线应用于液压支架电液控制系统具有较大优势。
3CAN总线节点的设计
基于CAN总线的液压支架电液控制系统中,每个支架控制器都是一个CAN节点,采用总线式拓扑结构,如图1所示。由于CAN总线驱动器最多支持110个CAN节点,当综采面的支架数超过该数目时,还需配备CAN总线中继节点。因此,电液控制系统的CAN总线上包括两类节点,普通节点与中继节点。
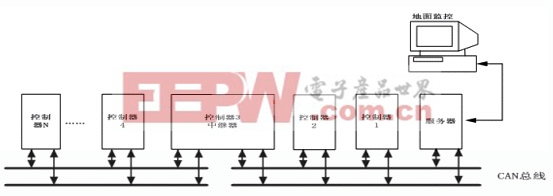
图1基于CAN总线的电液控制系统
3.1普通CAN节点设计
CAN总线的两层协议固化在它的相关芯片中,主要是总线控制器和总线驱动器。总线驱动器选用Philips的PCA82C250。总线控制器则采用Motorola单片机中自带的MSCAN模块。该模块是Motorola为16位MCU设计的通用CAN通信模块。采用自带CAN模块的Motorola单片机在最大程度上简化了节点电路的设计,普通CAN节点设计的电路原理图如图2所示。
3.2CAN总线中继节点的设计
普通CAN节点只需使用1个MSCAN模块,而CAN总线中继节点则要用到单片机中的2个MSCAN模块,通过外加驱动电路分别连接到CAN总线的两个网段上,实现中继的功能。
中继节点接收3种数据帧:广播数据帧,需要被转发的数据帧以及针对中继节点的数据帧。对应于要接收的3种数据帧,分别设置3个接收滤波器。而普通节点只需设置2个滤波器即可满足要求。从转发的方式来讲,转发有直接转发和翻译转发两种。直接转发是最简单的转发方式。采用直接转发方式要求两个网段具有相同的数据帧格式,而数据帧格式不同时则需要采用翻译转发的方式。在液压支架电液控制系统中,所有网段的数据帧格式都是相同的。因此,中继节点采用直接转发方式。
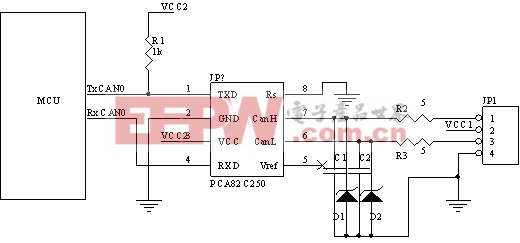
图2CAN总线节点电路原理图















评论