
基于CAN总线的仓库温湿度监控系统的设计
在仓库的货物的管理中,需要对温度、湿度等环境参数进行监控,以保证仓库的安全。随着库区的面积逐渐扩大,需要传输能力强和通信距离远的监控系统来有效地对仓库货物进行监管。
本文引用地址:http://www.amcfsurvey.com/article/163626.htmCAN(ControllerAreaNetwork,控制器局域网)总线技术具有先进的多主网络结构、通讯距离远、价位低、可靠性高、系统容量大、安装方便、维护费用低、性价比高等优点。特别对库区较大、仓库分布较分散的大型仓库的监控非常适用。
2系统硬件设计
本系统采用分布式监控网络,主要分为上位机和下位机两部分,而上位机硬件包括CAN通讯适配器和上位监控管理机组成;下位机则由CAN节点和现场传感器组和温度湿度参数控制器组成,如图1所示。
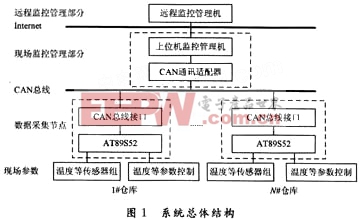
其工作原理是下位机节点通过一定时间间隔把含有地址、温度、湿度等数据量的报文向CAN总线发送,总线通过自身仲裁确定先把优先级最高的数据放到总线上,然后自动仲裁依次发送优先级相对较低的报文到CAN总线。由于CAN总线的信息存取利用了广播式的存取工作方式,报文可以在任何时候由任何节点发送到空闲的总线上,每个CAN总线节点都接收到了总线上出现的报文信息,通过每个节点的报文滤波和地址设置,上位机CAN节点能实现上传报文的接收。上位机接收到报文信息后通过组态王软件实现仓库温度等参数实时监视和记录。同时上位机通过仓库人机界面可随时发送控制信息到CAN总线上,地址匹配的CAN总线节点能收到信息。通过这种方式即可实现仓库的温度等参数的反馈控制。
2.1上位机系统的硬件设计
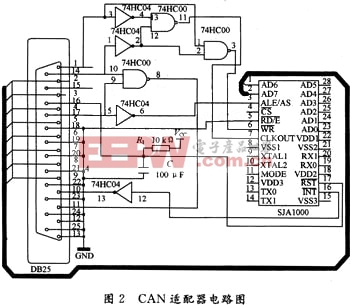
CAN通讯适配器承担上位计算机和CAN节点之间的数据转发任务,实现上位机与下位机的通讯。利用EPP并行口实现PC机与SJA1000的通信,关键在于实现SJA1000的读写时序,实现的方法有两种:软件产生读写时序电路和硬件产生读写时序电路。该系统用硬件产生读写时序电路,通过逻辑门的时间延迟来产生SJA1000握手等信号。设计电路如图2所示。
2.2下位机系统的硬件设计
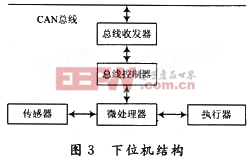
下位机包括CAN节点、现场传感器组和温度湿度参数控制器。CAN节点主要是完成CAN总线信号和CAN网络通讯的配置。现场传感器组和参数控制器部分主要是和CAN节点完成实时监测仓库内各个测试点的温度、湿度情况,还要负责接收上位管理机的命令,根据上位管理机的要求传输数据和反馈控制。下位机结构组成如图3所示。
2.2.1CAN节点
CAN节点器件主要包括:微处理器AT89S52单片机、CAN控制器SJA1000和CAN总线收发器PCA82C250。
(1)CAN控制器SJA1000
SJA1000的工作模式通过其内部的时钟分频寄存器CDR中的CAN模式位来选择。硬件复位时默认模式是BasicCAN工作模式。SJA1000相对于微控制器相当于是一存储映象I/O设备,他的地址域由控制段和信息缓冲区段组成,在向下加载初始化期间,控制器可被编程以设定通信参数,CAN总线上的通信可通过此段由微控制器控制。
SJA1000内部寄存器有的是只能写的,有的是既可读又可写的。系统正常工作之前,微控制器要对某些寄存器进行初始化,以保证系统的各部分之间能进行正确的数据交换。CAN控制器的内容都是通过微控制器写入的,其读写时序如图4所示。
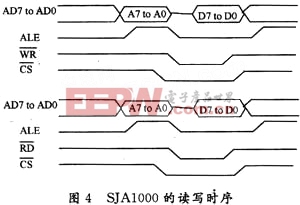
从读/写时序图来看,微控制器对SJA1000进行操作,由于SJA1000内可存储数据的地址信息。现场数据采集与控制层负责从现场采集数据以CAN协议的格式发送到总线上,根据需要对现场设备进行实时控制和监视。系统上电后微处理器先对自身和SJA1000进行初始化,以SJA1000传送到CAN总线上或直接现场显示、控制;对从CAN总线上来的信息则采用中断方式,系统每接收到一帧信息,便产生一次中断,引发微处理机进入中断,在中断服务程序中读取该帧信息并传送到现场。
(2)CAN收发器PCA82C250
PCA82C250为CAN收发器,是CAN控制器和物理总线间的接口,提供对总线的驱动发送能力,CAN控制器的差动发送能力和CAN控制器的差动接收能力。他有很强的抗瞬间干扰和保护总线的能力,具有3种不同的工作模式即高速、斜率控制和待机。总线上的某节点掉电不会影响总线,在40m内实现高速应用可达1Mb/s,最多可挂110个节点。管脚8(RS)允许PCA82C250选择3种不同的工作模式,如表1所示。

















评论