
基于PLC的多层升降横移立体停车库控制设计
随着汽车的急增致使城市停车难问题不断恶化,而作为解决城市静态交通的有效措施――向空间、向高层发展的自动化立体停车设备,以其占地面积少、停车率高、布置灵活、高效低耗、性价比高、安全可靠等优点,越来越受到人们的青睐。目前市面上常见的机械式立体停车库有:升降横移类、垂直循环类、多层循环类、水平循环类、平面移动类、巷道堆垛类、垂直升降类和简易升降类等8种,其中升降横移类以其结构简单、操作方便、安全可靠、造价低等优点,在国内车库市场占有绝对优势的市场份额。
本文引用地址:http://www.amcfsurvey.com/article/163309.htm升降横移立体车库运行原理
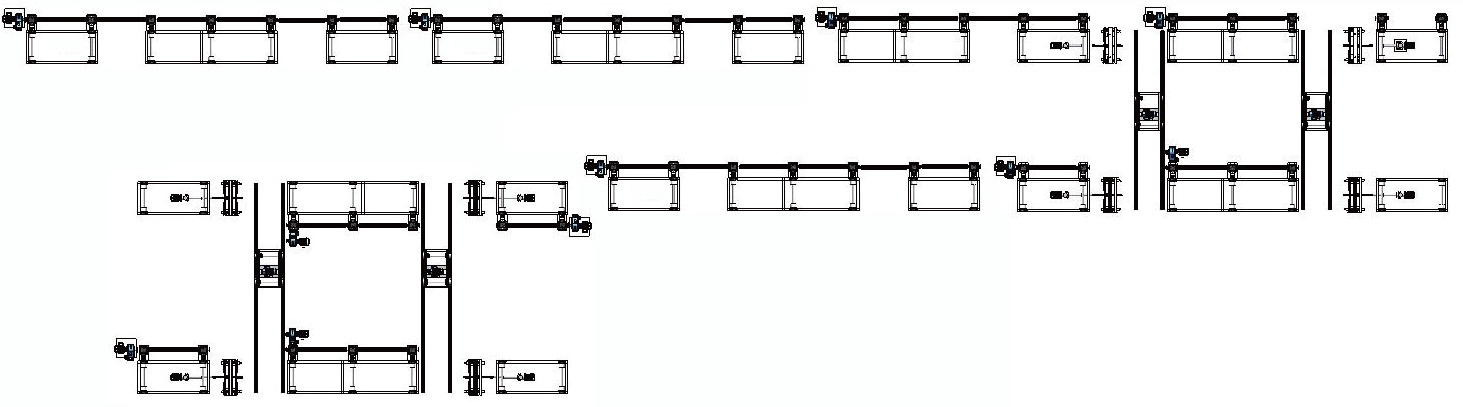
升降横移类机械停车库利用托盘移位产生垂直通道,实现高层车位升降存取车辆。其车位结构为2维矩阵形式,可设计为多层和多列。由于受收链装置及进出车时间的限制,一般为2~4层(国家规定最高为4层),2层、3层者居多,现以典型的地上3×3升降横移式为例,说明停车库的运行原理。
立体车库结构特点是:底层只能平移,顶层只能升降,中间层既可平移又可升降。除顶层外,中间层和底层都必须预留一个空车位,供进出车升降之用。当底层车位进出车时,无需移动其他托盘就可直接进出车;中间层、顶层进出车时,先要判断其对应的下方位置是否为空,不为空时要进行相应的平移处理,直到下方为空才可进行下降动作,进出车完成后再上升回到原位置。其运动的总原则是:升降复位,平移不复位。
控制系统方案的确定
升降横移立体停车库以停放轿车为主,其代价较昂贵,而且立体停车库使用时涉及到人身和车辆的安全,所以对设备的安全性和可靠性要求非常高。PLC采用了以计算机为核心的通用自动控制装置,集微机技术、自动化技术、通讯技术为一体,可靠性强、性价比高、设计紧凑、扩展性好、操作方便,适用于频繁启动和恶劣的环境,因此在立体停车库控制系统中通常采用PLC作为电控系统的核心。
作为网络底层的现场总线技术以其简单的结构,在控制系统的设计、安装、运行、维护上体现出极大的优越性,因此本文采用Profibus-FMS和Profibus-DP构成两层控制网络。Profibus-FMS主要完成中等传输速度的循环和非循环通信任务,通常用于PLC与PC、PLC与PLC之间的互相通信。而底层网络则选择了Profibus-DP,这主要因为Profibus-DP是经过优化的高速通信联接,用于设备级分散I/O之间的通信,构成获得最短总体循环时间的单主站系统。本系统运用现场总线技术实现了现场智能设备和自动化控制设备之间的开放式、数字化、多节点通信,并提高了系统工作的可靠性和灵活性。
同时,本系统以上位机作为监控机,利用上位机的数据通信手段,数据处理能力和图形显示、多媒体技术,通过现场总线,实时接收和处理下位机PLC从现场采集的各种状态、控制、报警信号,并利用这些信号驱动PC控制界面中的各种图形,实时显示现场的各种状况,在操作员和停车库之间构造出形象、直观的界面,对操作运行和故障给出提示、报警等。
立体车库控制系统设计
控制系统的组成
立体车库控制系统由上位机监控系统和下位机PLC控制系统组成,图1为该系统结构框图。其中,监控系统由“上位机+Profibus现场总线+PLC+现场操作机构”构成,以PC机为核心,配备有打印机、音效设备、收款机、显示器等。如果车库是由多个3×3单元的组合,可以用一个PLC控制一个车库单元,多个PLC共同构成多点结构的局域网。如果车库的规模足够大,还可以考虑配备操作器、触摸屏和IC卡磁卡机等来实现智能化自动控制。
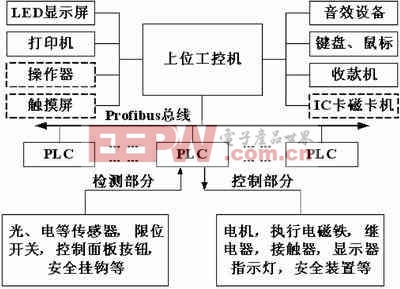
图1 控制系统结构图
车库控制方式分为3级――手动、半自动和全自动。手动是在现场用手操作器对每个托板进行点动控制,应用于车库检修、突然停电、紧急停机和车库故障4种情况;半自动为操作PLC控制面板上的按钮由PLC实现自动逻辑控制;全自动是由计算机给出存取命令由PLC来执行任务(要求配备“操作器”)。其中,手动方式为最高优先级,而半自动或全自动方式用于正常进出车处理,其中半自动方式优先级高于全自动。在计算机脱机情况下,PLC控制面板可以完成所有存取车操作,而且本设计要求手动、半自动、全自动之间必须能够互锁。
PLC控制系统设计
PLC是车库控制系统的核心,其操作大致分为三类:以故障诊断和处理为主的操作;联系现场状况的数据I/O操作;执行用户程序以及响应与PLC相连的外部设备的命令操作。当有存取操作时,PLC会接收和分析操作人员在控制面板按钮或上位机输入的指令,做出合理的工控安排:判断检测元件的状态,读取车库机械驱动部分的信息;然后,将信息反馈到执行元件,拖动车位板,实现其位置移动,完成车辆的存取操作和信号的显示(指示灯)。整个动作区域配有光电检测及多重安全系统,以防异常情况发生。
该系统中PLC主要完成对托盘、托板位置及运行状态的检测和存取车的操作。用各种光电开关、行程开关检测位置状态,用接触器、继电器执行对拖动电机的起停控制。
对车位的操作就是控制横移小电机和升降大电机,使它们在不同时间实现正反转。而且上层升降动作和以下各层的横移动作必须是互锁的,即当上层泊位在升降时,下面各层泊位不能移动,反之亦然。并且上层泊位每次只能有一个泊位进行上下升降运动。
为了保证存取车可靠安全,系统要精确定位。行程开关的设置保证了托板能平移到预定位置以及托盘能上升或下降到准确位置,但同时,行程开关逻辑要严格互锁。例如1、2水平限位开关在静态情况下只能有一个是断开的,如果2个以上开关闭合即表示托板不到位。在车库静止时, 2、3层所有挂钩信号均应断开(负逻辑),2层上限位开关断开,3层上限位开关闭合。
此外,为了保证载车板运行过程的安全性,必须采取传动系统自锁保险设计和安全挂钩保险设计:如链传动采用制动电机,无论发生什么情况,都处于自我保护状态;控制安全挂钩运动的电磁铁上必须有一反馈信号,以指示挂钩是否已把托盘挂好等。
光电开关相关文章:光电开关原理












评论