
400Hz逆变器电压环反馈控制设计
摘要:主要介绍了Bode定理,以此为理论基础,介绍了逆变器建模,电压环反馈控制设计等。
本文引用地址:http://www.amcfsurvey.com/article/162417.htm关键词:Bode定理;Bode图;回路增益
1 控制理论基础
1.1 回路增益
对于一般负反馈控制系统,其闭环系统方框图如图1所示。闭环传递函数![]() ,其特征方程式为F(s)=1+G(s)H(s)=0,特征方程式的根即为系统的闭环极点。由此方程式可以看出G(s)H(s)项,其包含了所有关于闭环极点的信息,一般称G(s)H(s)为回路增益。实际应用中,可通过对回路增益Bode图的分析来设计系统的补偿网络,以达到闭环系统稳定性要求。
,其特征方程式为F(s)=1+G(s)H(s)=0,特征方程式的根即为系统的闭环极点。由此方程式可以看出G(s)H(s)项,其包含了所有关于闭环极点的信息,一般称G(s)H(s)为回路增益。实际应用中,可通过对回路增益Bode图的分析来设计系统的补偿网络,以达到闭环系统稳定性要求。
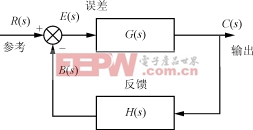
图1 闭环系统框图
1.2 Bode定理
Bode定理对于判定所谓最小相位系统的稳定性以及求取稳定裕量是十分有用的。其内容如下:
1)线性最小相位系统的幅相特性是一一对应的,具体地说,当给定整个频率区间上的对数幅频特性(精确特性)的斜率时,同一区间上的对数相频特性也就被唯一地确定了;同样地,当给定整个频率区间上的相频特性时,同一区间上的对数幅频特性也被唯一地确定了;
2)在某一频率(例如剪切频率ωc)上的相位移,主要决定于同一频率上的对数幅频特性的斜率;离该斜率越远,斜率对相位移的影响越小;某一频率上的相位移与同一频率上的对数幅频特性的斜率的大致对应关系是,±20ndB/dec的斜率对应于大约±n90°的相位移,n=0,1,2,…。
例如,如果在剪切频率ωc上的对数幅频特性的渐进线的斜率是-20dB/dec,那么ωc上的相位移就大约接近-90°;如果ωc上的幅频渐近线的斜率是-40dB/dec,那么该点上的相位移就接近-180°。在后一种情况下,闭环系统或者是不稳定的,或者只具有不大的稳定裕量。
在实际工程中,为了使系统具有相当的相位裕量,往往这样设计开环传递函数,即使幅频渐近线以-20dB/dec的斜率通过剪切点,并且至少在剪切频率的左右,从ωc/4到2ωc的这段频率范围内保持上述渐近线斜率不变。
2 逆变器电压环传递函数(建模)
一个逆变器的直流输入电压24V,交流输出电压110V,频率400Hz,电路开关频率40kHz,功率500W。其控制至输出整个电压环的电路结构如图2所示。现求其回路增益。
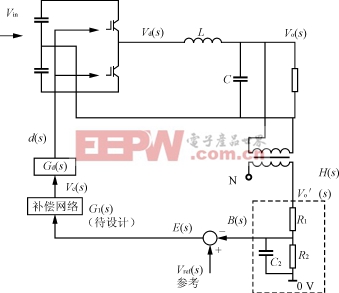
图2 逆变器电路结构图
2.1 驱动信号d(s)至输出Vo(s)的传递函数
1)驱动信号d为SPWM脉冲调制波,加在IGBT管的栅极(G)上,而输入母线电压Vin加在管子的集电极(C)和发射极(E)两端,根据图2所示结构,输出电压Vd与驱动d之间相差一个比例系数,设为K1,则K1=![]() 。在具体的逆变器电路中,母线电压Vin为±200V,驱动信号为12V,代入可得K1=400/12=33.33。
。在具体的逆变器电路中,母线电压Vin为±200V,驱动信号为12V,代入可得K1=400/12=33.33。
2)LC低通滤波网络传递函数推导可得![]() =
=![]() ,其中L=3mH,C=2μF。
,其中L=3mH,C=2μF。
综上,驱动信号d(s)至输出Vo(s)的传递函数为![]() =G1(s)=
=G1(s)=![]() ;
;





评论