
新型多功能智能小车的设计与应用
L298N驱动2个电机,2、3脚和13、14脚之间分别接2个电动机。5、7、10、12脚接输入控制电平,控制电机的正反转,ENA(6脚),ENB(11脚)接控制使能端,控制电机的停转。其中5、7、10、12脚分别接P1.0,P1.1,P1.2,P1.3,L29N的逻辑控制功能如表1所示。本文引用地址:http://www.amcfsurvey.com/article/162121.htm

1.5 传感器模块
1.5.1 传感器的安装
传感器的安装如图2所示,车头一共有5个黑白线传感器和3个金属传感器。中间的金属传感器(检测距离为8 mm)是来检测跑道上的铁片,旁边的2个金属传感器(检测距离为4 mm)是来检测距离引导线70 mm以上的金属片的。由于在拐弯断线处,小车可能会偏出轨道,无法继续寻迹,故最外围的2个黑白线传感器就是使小车在偏离轨道一定范围的情况下,仍能够调整车头,重新回到轨道上,故两个传感器的距离要尽量的远,在不超出车身范围的情况下。中间的黑白线传感器的可扩展为让小车在断线处仍能够画出断线部分的轨迹(显示一段断线,属于特色部分),另外两个黑白线传感器的任务就是让小车完成基本的寻迹功能。

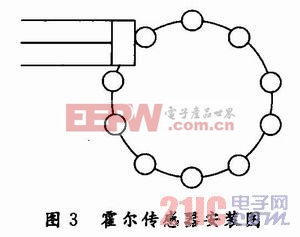
1.5.2 霍尔传感器
霍尔传感器是利用霍尔效应实现磁电转换的一种传感器,它具有灵敏度高,线性度好,稳定性高、体积小和耐高温等特点。对测速装置的要求是分辨能力强、高精度和尽可能短的检测时间。
霍尔传感器和磁钢配套使用,用来计算小车的行驶路程。本作品用到两个霍尔传感器和20个磁钢,左右后车轮各一对(1个霍尔传感器和10个磁钢),安装方式如图3所示。磁钢数量越多,测量出的车轮圈数约精确,行驶路程也越精确。
1.5.3 金属传感器
选用的金属传感器为NPN常开型传感器,理论的测测量距离为4 mm,传感器输出为1、0开关量信号,当金属传感器感应到金属片时,其输出由高电平变为低电平。

霍尔传感器相关文章:霍尔传感器工作原理
霍尔传感器相关文章:霍尔传感器原理














评论