
新型多功能智能小车的设计与应用
摘要:介绍智能小车自动完成设定任务的设计。本设计以玩具小坦克为车体,以单片机AT89S52为核心,利用黑白线传感器判断小车行驶的轨迹;利用金属传感器判断轨迹中放置的铁片;由单片机对小车状态做出实时反应,并输出相应的控制指令。该系统通过调节PWM输出可控制小车的前进、后退、转向、加速、减速等动作;可精准地完成小车沿黑色引导线的寻迹(断开引导线亦可)、检测铁片个数、实时LCD显示行驶距离、时间和行车轨迹等功能。该设计功耗小,成本低,精度较高。
关键词:AT89S52K;黑白传感器;金属传感器;霍尔传感器;LCD
0 引言
人类的研究活动已摆脱了地球生物圈的束缚而广泛地进入外层空间和海洋深处。对月球和太阳系其他行星的探测,对太阳系以外的宇宙进行考察,对数千米以下的海底的研究,都是目前单靠人力所不能及的。自动控制系统正在代替人们完成这些任务。在战场上的军事活动中,在恶劣环境条件下的生产劳动中,凡不宜由人直接承担的任务,均可由自动控制系统代替,如智能小车可以适应不同环境,不受温度、湿度等条件的影响,完成危险地段、人类无法介入等特殊情况下的任务。高科技自动控制系统及装置已日益成为现代社会活动中离不开的自动智能设备。
本文设计方案以多功能的智能小车作为自动控制系统的载体,以单片机AT89S52为核心;利用黑白线传感器判断小车行驶的轨迹,利用金属传感器判断轨迹中放置的铁片,由驱动执行电路完成小车的行驶,由单片机对小车状态作出实时反应,并输出相应的控制指令;通过LCD显示器对小车运行的时间、铁片数目以及行驶路程等参数进行直观显示。整个系统安装于车体上并实施控制。安装在车上的多个测距传感器精度高,能够准确测算出速度与距离,各种声光器件实时显示各模块的工作状态。全程无需人为控制,顺利完成设定任务。经性能指标测试实验,该系统可实现控制小车的进退转向等动作且精度较高。
1 硬件设计
1.1 车型
本设计选用的履带车,采用带电感的大扭力260马达,具有动力性能强、底盘稳定性高等特点,左右电机速度调整到一定时,不易偏离轨道。
1.2 显示模块
采用2行16个字的MD1602A液晶显示器,其功耗低、体积小、显示内容丰富。可通过与单片机连接,编程,完成显示时间和距离等等一系列的功能。
1.3 电源
单电源+DC/DC转换供电。由于电机驱动和其他芯片工作电压不一样,需各自独立供电。使用6节电池产生约7~9 V的电压,进行DC/DC转换,可得到5 V左右的稳定电压。该方案电路简单、性能稳定可靠。
1.4 直流电机
采用专用芯片L298N作为电机驱动芯片。采用一个L298N,可以同时驱动两个电机。使用PWM方式的调速电路搭接简单、驱动电流大、可靠性高,电机驱动原理如图1所示。
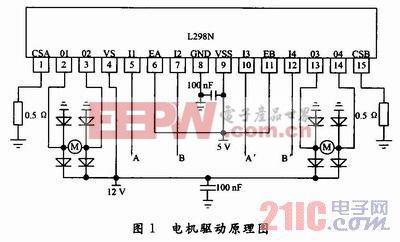
L298N芯片内部包含4通道逻辑驱动电路,是一种二相和四相的专用驱动器,内含2个H桥的高电压大电流双全桥驱动器,接收标准TTL逻辑电平信号,符合两轮驱动和单片机控制。它可驱动46 V,2 A以下的电机,满足小车马达的驱动要求。

霍尔传感器相关文章:霍尔传感器工作原理
霍尔传感器相关文章:霍尔传感器原理














评论