
MEMS加速度传感器的自动校准平台
摘要:介绍了一种基于MEMS加速度传感器的自动校准平台的设计方案。从数学模型入手,推导了倾角测量算法并设计了调平控制方案。在电机控制环节加入改进后的PID算法,解决了输出突变导致系统性能下降的问题。快慢档的设定使系统在缩短调平时间的同时兼顾精度的要求。实验结果表明,该系统工作稳定,可用于一般调平场合。
关键词:MXC62025G;自动调平;PID控制;抗干扰
引言
现代测控系统在正常工作时往往需要一个基准平台,在这样的客观需求下调平技术应运而生。目前该技术已广泛应用于各种工业领域,如起重机支架、钻井平台、火炮底座、卫星天线基座、导弹发射平台等。传统的手动调平方式费时费力,严重影响了平台上设备机动性能的发挥。自动校准平台的研制弥补了手动方式的不足,并且在效率、精度、可靠性等方面都优于手动校准平台。本文介绍了一种能够实时监控平台状况并通过步进电机进行相应调节的自动校准平台。
1 倾角测量原理
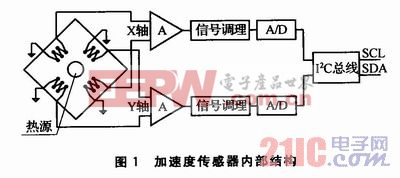
MXC62025G是美新(Memsic)公司推出的一款基于MEMS技术的双轴加速度传感器,集成了片上信号处理和I2C总线模块,无需外接A/D转换器便可以与微处理器通信。该传感器可以同时测量恒定和变化的加速度,测量范围为-2~+2 g,在25℃室温、3 V工作电压的条件下,其灵敏度可达512计数点/g。其内部结构如图1所示,硅片中心有一个热源,四周等间距地放置了4个热电堆。当硅片水平静止时,热源周围的温度梯度是均匀的,所以4个热电堆的温度相同,输出电压相同。当硅片倾斜或在某一方向上有加速度时,热源周围的温度梯度发生扰动,因而输出电压发生变化。
由于传感器的输出不能为负,因而需要减去一个偏移量来区分正负,此处取输出值的中值,即最大值与最小值之和的一半。另外,传感器的输出是加载在两个测量轴上的重力加速度的分量,要输出倾角值还需进行数据处理。假设X轴向的倾角为α,Y轴向的倾角为β,则输出值与倾角大小存在以下关系:
![]()
即

当倾角较小时,轴向加速度与倾角之间近似为线性关系,故有:![]() ,K值选取与倾角误差之间的关系如表1所列。
,K值选取与倾角误差之间的关系如表1所列。

不难看出,测量范围与测量精度是一对矛盾。为了提高系统的精度,应当尽量减小平台调节的幅度,所以自动校准平台应当先大致摆放到水平位置再按启动开关。

pid控制器相关文章:pid控制器原理
倾角传感器相关文章:倾角传感器原理










评论