
基于锁相环的可变量程转速控制系统
本文介绍的基于锁相环的可变量程转速控制系统,是为研制新一代具有卷绕特性的调速电机控制器而开发的[1],其转速信号检测方法具有结构简单、安装方便、价廉可靠的特点。
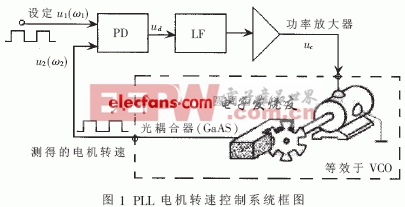
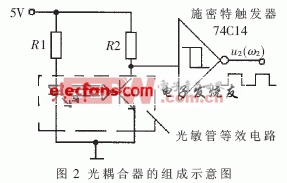
本文引用地址:http://www.amcfsurvey.com/article/161896.htm用锁相环路构成的电机转速控制系统的框图如图1所示,其中,VCO已由电机和光转速表取代。激励电压调节电机的转速,在电机的轴上安装一个开槽的扇形平盘。扇形盘转动时不断地切断发光二极管发出的光线,使光耦合器中的光敏管产生频率与电机转速成整数倍的方波脉冲序列u2(ω2)。这样,方波脉冲的频率与激励电压有一定的函数关系,等效为锁相环中的压控振荡器。为了使光电耦合器能输出波形良好的方波,在光敏管之后通常还要接一个施密特触发器,用于对信号整形,如图2所示。
2 PLL电机转速控制系统模型设计
由于电机具有较大的惯性,等效于一个时间常数很大的相位滞后网络,可能会对环路稳定性有较大的影响。
环路中采用CMOS鉴频鉴相器。光电耦合器产生的方波信号的频率与电机转速成正比,它与输入参考信号u1(ω1)的频率进行鉴频与鉴相。当锁相环路锁定之后,电机的转速可稳定在设定值上,没有跟踪频率误差,只有相位误差。所选用的鉴频鉴相器应保证环路具有足够的捕获范围,在各种不同的起始条件下,环路都能锁定。
下面重点介绍对电机和光转速表组合的传递函数的推导。
以上分析表明,由于电机和光转速表本身就是一个二阶系统,在考虑了环路滤波器的作用之后,整个控制环路就是一个三阶系统。由此得到的系统模型如图3所示。图3中设伺服放大器为增益等于Ka的零阶系统。
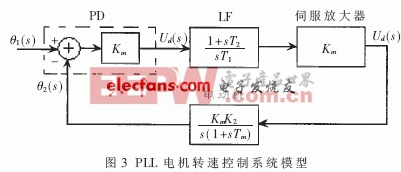
为了保证全系统稳定,环路滤波器必须具有零点(即相位超前校正功能)。可采用有源比例积分滤波器,否则在较高的频率上,闭环传递函数的相位可能会超过180°,导致系统不稳定。
在设计电机转速控制系统时,事先给定某些参数,如电机参数Km、Tm、扇形盘齿数K2等。其余的参数如伺服放大器增益Kα、环路滤波器参数τ1、τ2等,则需根据系统最佳动态性能以及稳定性能来选定。
















评论