
一种全自主足球机器人体系结构的设计和实现
足球运动是一种大家非常喜爱的运动。让机器人去踢足球,听起来像天方夜谭似的。机器人也能去踢足球? 而且,还是要组成一个队伍,不同的机器人要互相配合?要知道,机器人要参加比赛必须要有自己的眼睛,自己的双腿,自己的大脑,还得有自己的嘴--把自己的想法告诉别人,协同进行比赛。现在的足球机器人还没有做到像我们人一样。据科学家估计,这得再过五十年,即2050年左右才能做到在一个真的足球场地上,与我们人的比赛规则一样的条件下进行比赛。到那时可能电视转播的体育节目中机器人足球会占很大的比重。当然,这是猜测,目前为止,现实中在国际上最具影响力的机器人足球赛事组织有FIRA国际机器人足球联合会和ROBOTCUP国际机器人足球世界杯赛。
本文引用地址:http://www.amcfsurvey.com/article/161872.htm举办机器人世界杯足球赛的目的是为了促进分布式人工智能研究的发展。通过提供一个标准任务,使研究人员能够利用各种技术获得更好的解决方案,从而有效促进各领域的发展。研究中涉及的领域有:智能机器人系统、多智能体系统、实时模式识别与行为系统、智能体结构设计、实时规划和推理、基于网络的三维图形交互、传感器技术等。
足球机器人比赛虽然刚刚开展几年时间,但是它吸引了越来越多人的关注。因为它以喜闻乐见的方式走进了我们的视野,虽然它的体积很小,但是它的意义非常重大。它是综合了计算机技术,自动化技术,机电一体化技术,人工智能技术,模式识别技术的一门综合技术。足球机器人的核心技术是人工智能技术,它的目地是使机器具有人的智慧。它能使机器具有像人一样的感知环境,向环境学习的能力。人工智能包括智能控制、机器感知、机器情感、专家系统、人工生命、神经元网络和遗传算法等等。本文提出了一个全自主足球机器人的体系结构。以各种传感器模拟人的五官,以嵌入式计算机模拟人的头脑,以双轮和踢球器模拟人的四肢,以无限网络通信模拟多人踢球,用信息沟通实现配合,再加上控制软件就可以实现踢球所需的各种功能。
1 硬件体系结构
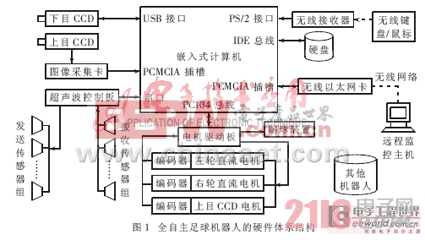
全自主足球机器人的硬件体系结构由六部分组成,即嵌入式计算机、视觉系统、超声波定位避障系统、无线通信系统、运动系统和电源系统。机器人的核心是嵌入式计算机,负责视觉信息处理、机器人定位与导航以及行为决策,相当于机器人的大脑。而视觉系统则相当于机器人的眼睛,负责实时地提供环境信息,使决策模块能够针对赛场上的动态环境迅速做出反应。超声波定位避障系统可以让机器人避开前方的障碍物,并能算出距前方障碍物或边墙的距离。运动系统负责驱动机器人本体移动、摄像机的旋转和踢球装置的运转。无线通信系统是多机器人合作及软件系统开发的基础。电源系统采用直流充电电池,为以上所有部件提供电能。机器人车体采用铝合金材料,极大地减轻了机器人的重量。足球机器人的硬件体系结构如图1所示。










评论