
一种智能机器人系统设计和实现
4.3 智能巡线试验
机器人的巡线可用于机器人比赛、自动化无人工厂、仓库、服务机器人等领域,因此研究巡线实现过程有一定的现实意义。试验如图5所示。

实验场地是绿色毛毯状物质,其中白线宽度为30 mm。在启动试验平台之前要调整摄像头视角,如果视角太大,则循线精度很难保证,甚至会脱离预期的轨迹。经过试验验证,当摄像头光轴与地面夹角大约为60°左右时,其循线可靠性及精度能够得到很好的保证。
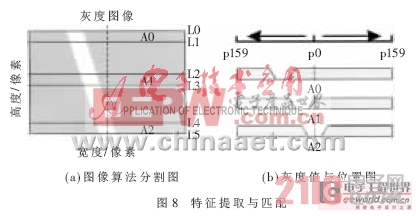
②把图像分成三个图像带:A0,像素从L0~L1;A1,像素从L2~L3;A2,像素从L4~L5;再把每个带分成左右两半,其像素从中间开始向两边递增,即从p0~p159,并分别给出权值,求其每点的灰度值与相应点权值并求出总和,其表达式为: Sj=V1*1+V2*2+…+Vi*i+…+Vn*n ③用Ai右边区的总和减去Ai左边区的总和的差值,看是否落在误差的允许范围[-δ,δ]之内,即表达式为: ④根据Tm值的大小就可以确定机器人的位置是左偏、右偏,或在误差范围之内,随之就能产生机器人的控制策略。 实验结果表明,本课题设计的机器人能够很好地实现直线爬坡、巡线行走等功能,并可以实时采集声音和图像信息。在数据处理上,采用ARM9核的S3C2410处理器,数据处理快、实时性强、稳定可靠、效率高。移动机器人随其应用环境和移动方式的不同,研究内容也有很大差别。其共同的基本技术有传感器技术、移动技术、操作器、控制技术、人工智能等方面。它有相当于人的眼、耳、皮肤的视觉传感器、听觉传感器和触觉传感器。移动机构有轮式(如四轮式、两轮式、全方向式、履带式)、足式(如 6足、4足、2足)、混合式(用轮子和足)、特殊式(如吸附式、轨道式、蛇式)等类型。轮子适于平坦的路面,足式移动机构适于山岳地带和凹凸不平的环境。移动机器人的控制方式从遥控、监控向自治控制发展,综合应用机器视觉、问题求解、专家系统等人工智能等技术研制自治型移动机器人。
(Vi为灰度值,i为权值;0≤n≤159,n为整数;L0≤j≤L1或L2≤j≤L3,j整数)
Tm=(Sj右-Sj左)∈[-δ,δ] (m=0、1、2)
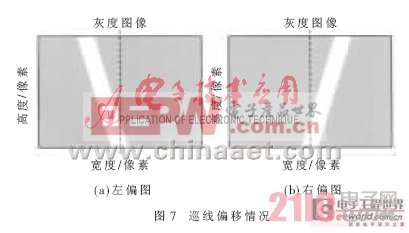
(1)控制算法描述:机器人的动态巡线过程,需要提取并能检测判断机器人相对白线的位置情况,形成控制策略,完成机器人的运动姿态调整。其算法实现流程如图6所示,巡线偏移情况如图7所示。 (2)特征匹配:图像匹配技术是数字图像处理领域中的一项重要研究,基本原理就是根据已知模式(模板图),到另一幅图中搜索相匹配的子图像,该过程被称为模板匹配。通常,图像的模板匹配技术可以分成直接基于灰度值的方法以及基于特征提取的方法两大类。 这两种算法共同的缺陷是时间复杂度高,不利于实时操作,特别是在在线检测、机器人视觉伺服等需要从大量视频信号实现数字处理海量图像的匹配场合。由于本课题采用的处理器S3C2410硬件不支持浮点运算,无法采用上述方法识别机器人相对于白线的位置是左偏还是右偏。为此,结合机器人应用环境的特殊情况,对二维图像匹配算法进行了改进与简化,其基本思路和实现过程如下: ①在现场采集一幅图像,如图8(a)所示(理想情况),大小为320×240像素。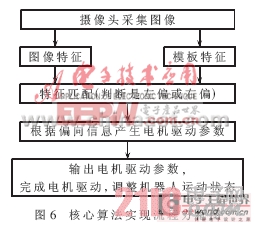













评论