
飞行试验颤振数据实时监控系统
1.2 颤振数据实时监控系统软件及数据传输过程
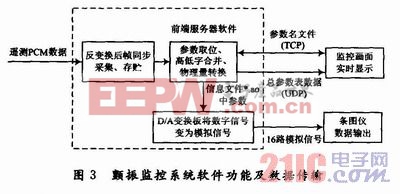
颤振数据实时监控系统软件及数据传输过程如图3所示。其中颤振数据实时监控系统软件由前端服务器程序和客户端实时监控程序组成,形成服务器和客户端模式。前端服务器软件需加载带头文件,客户端多幅监控画面用到的总参数名文件以及条图仪通道参数名的信息文件。服务器软件根据加载的带头中同步字信息、帧结构信息将接收到的数据进行二次同步,经过同步处理后的数据才能进行校准计算。帧同步后服务器软件对颤振数据进行采集,在勾选“原始数据存盘”项的情况下存贮数据。本文引用地址:http://www.amcfsurvey.com/article/161862.htm
实现服务器与客户端的信息通信及数据传输是基于TCP(传输控制协议)和UDP(用户数据报协议),并采用WinSock的网络编程接口实现其网络通信。TCP为两台主机提供高可靠性的数据通信,为了提供可靠的服务,TCP采用了超时重传、发送和接收端到端的确认分组等机制;UDP协议只是把称作数据报的分组从一台主机发送到另一台主机,但并不保证该数据报能达到另一端。
因此总参数名文件按TCP协议通信,前端服务器程序将流式套接字置入监听模式,当有客户端程序的连接请求时,接受请求并向请求方发送监控参数表,最后断开与客户端程序的TCP连接。为了避免因服务器程序晚于客户端监控程序启动造成无法与服务器连接的情况,监控程序采用定时器定时向服务器发送连接请求,当连接成功后关闭定时器。
然后将完成取位、高低字合并、物理量转换后的数据,根据以UDP形式向客户端程序广播发送。TCP是一个面向连接的协议,它意味着分别运行于两主机(由IP地址确定)内的两进程(由端口号确定)间存在一条连接。建立一个连接需要3次握手,而终止一个连接要经过4次握手。而一端使用UDP向另一端发送数据报时,无需任何预先的握手。UDP是不可靠无连接的,它不能保证数据报能安全无误地到达最终目的。虽然
UDP协议不提供反馈信息来控制机器之间传输的信息流量,可能出现丢包、重复。但在数据传输时间很短,以至于此前的连接过程成为整个流量主体的情况下,UDP也是一个好的选择。本监控系统服务器与客户端在同一个监控大厅内,传输距离很短。因此向客户端发送数据采用UDP协议而不是TCP协议,以保证高效率发送数据。飞行实践证明在1.0 Gb/s网速的由25台PC机组成的局域网内,颤振数据按采样率512点/s,传输200个参数是完全可靠的。
另外,基于UDP协议的通信模式只需将Socket与指定的端口号和本地的IP地址绑定就可进行数据传输,控制算法简单。而且采用UDP协议有利于系统的扩展,可以根据需要在不影响系统性能的前提下减少或增加客户端微机的数量。
UDP协议不使用确认信息对报文的到达进行确认,也不对收到的报文进行排序。导致报文可能出现延迟以及乱序的现象。但是颤振数据要求严格按时间均匀输出,否则条图仪绘出的图形产生变形,有台阶出现,不易辩识试验动作段。假设颤振数据的采样率为512点/s,要求计算机系统每隔不到2 ms就要响应1次。因此在现有的操作系统中开发软件,不能保证服务器均匀地向条图仪发送数据。为保证颤振数据时间上的均匀性,在用作服务器的PC机上除PCM反变换板外加装D/A变换板。利用D/A板的缓冲、定时功能,每次向条图仪发送多个点的数据,设置条图仪绘图的时间间隔,实现均匀输出。
同时由于该系统具有实时、磁带回放、磁盘文件数据回放多种工作模式,前端服务器程序也可对机载磁带数据、本系统存贮数据等不同格式的数据进行回放。帮助工程师在试飞的不同阶段利用现有格式的数据进行监控画面的调试,或实现飞行后对感兴趣的数据重现。




评论