
高精度超声倒车雷达的设计
摘要:为解决超声倒车雷达指向性不足和存在探测盲区的缺点,设计使用步进电动机驱动小波束角超声传感器做扇形扫描探测的办法。设计中使用步距角为7.2°的步进电动机驱动波束角为5°的超声传感器在每一个步进角度上进行测距。结合测距的角度和测得的距离就可得到准确的障碍物位置信息。并且,由于传感器的有效探测角度大于电机的步进角度,所以每一次测距的探测范围会相互交叠,消除了探测盲区的存在。实验证明,使用步进电机驱动超声传感器进行探测,其准确度为传统倒车雷达的6倍以上。
关键词:超声波测距;倒车雷达;探测盲区;步进电机;扇形扫描
倒车雷达,又称为泊车辅助系统,是车辆泊车时的安全辅助装置。倒车雷达系统能够在泊车时以声音、指示图形或视频影像等方式向驾驶员反映车辆后方的环境状况,解除视觉死角中的潜在威胁,提高车辆停泊的安全性。目前倒车雷达的应用十分广泛,绝大多数车辆都已经将倒车雷达作为必不可少的标准配件。
目前的倒车雷达系统大多采用超声波测距原理:通过超声波测距装置测取车辆后方的障碍物距离,以此为依据来判断泊车环境。超声波测距具有能量消耗缓慢、传播距离远的优点,且不易受光线、烟雾、电磁等干扰的影响,可以在各类天气下使用;并且利用超声波测距原理简单、易于实现,成本低廉、可靠性也好,因而广泛应用于各类倒车雷达中。但是由于超声波测距系统自身的原因,以往的倒车雷达只能够模糊地判断障碍物的大致位置,并不能准确地指示泊车的环境状况,而且总会存在一定的探测盲区。因此,设计无盲区的高精度倒车雷达具有较高的应用价值。
1 超声波测距的特性
1.1 超声波测距的原理
超声波测距,是依靠超声传感器向外发射超声波,然后接收超声波遇到障碍物后反射回来的回波,依据发射和接收的时间间隔t以及声波的传播速度v,来计算传感器和障碍物之间的距离S。即

式(1)中v为声波传播速度。在空气介质中,声波的传播速度会受到温度、湿度、气压等因素的影响,其中温度对声波速度的影响最大,其补偿关系为:
![]()
由此可知,超声波测距中,声波的传播速度和声波发射与接收的时间间隔是判断距离的两个依据。如果测距环境的温度变化不大,或者系统对测距结果不要求有很高的精度,就可以忽略温度对声波传播速度的影响,以v=340m/s的恒定值作为声波传播的速度,在这样的情况下,回波时间的长短就成为测距的唯一依据。
在超声倒车雷达的设计中,由于系统的探测精度只要达到厘米级,所以一般不需考虑温度补偿,而只根据回波时间来判断所测距离。
1.2 超声波测距指向性的不足
超声波测距装置的核心部件是超声传感器,超声传感器是发射和接收超声波的装置。传感器在发射超声波时,能量并不是均匀分布的,而是存在波束角的概念。
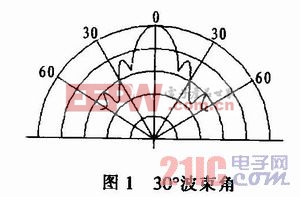
超声传感器在发射超声波时,沿传感器中轴线的延长线(垂直于传感器表面)方向上的超声射线能量最强,而其他方向上的声波能量逐渐减弱。以传感器中轴线的延长线为轴线,由此向外,至发射能量减少至半数(-3 dB)处,这个夹角被称为超声传感器的波束角,如图1所示。













评论