
基于Petri网的机车故障诊断方法研究
1 引言
本文引用地址:http://www.amcfsurvey.com/article/161443.htm目前,对于机车故障检查与诊断存在各种方法,其中专家系统,故障树分析方法(fta),以及两者的结合体是被广泛接受的方法,然而,他们也存在一些缺陷;fta仅能表示逻辑关系[1],不能表示动态行为;而专家系统突出弱点就是知识获取的“瓶颈”问题[2];基于故障树的专家系统诊断系统在一些方面虽得到优化,但是由于故障树模型之间的缺陷,又加上诊断的规则数目较多,当添加修改规则时,易出现规则之间的冲突和冗余,无法保证专家系统高效、正确地运行。
在故障检测与诊断领域中,petri网不仅能够用图形符号表示故障事件系统逻辑关系,知识的完成和诊断推理,而且能够表示系统的动态行为,故petri网模型能够用于机车故障检测和可靠性的分析。
在此利用petri网的可达性和状态方程方法,分析故障树信息,解决故障检测和故障传播问题。与基于故障树的诊断方法相比,本文提出的方法具有结构表达图形化、 推理搜索的快速化以及诊断过程的数学化等优点。
2 petri网理论基础及分析
2.1 petri网结构和分析方法
从图形上看,petri网由4种不同类型的元素组成,即库所(place,用“○”表示)、转移(transition,用“|”表示)、连接库所和转移的有向弧及位于库所中的托肯(token,用“·”表示)。库所表示系统状态的逻辑描述,转移表示系统中事件或行为产生过程,输入函数(i)和输出函数(o)分别描述库所和转移之间的联结函数关系。若一库所被赋与k个标记(k为非负整数),则说该库所有k个托肯,也称该库所被标记。于是定义标记petri网为一5元组:
∑=(p,t,i,o,m)。以图1所示petri网为例对上述定义进行具体描述[6]。
∑=(p,t,i,o,m);
p={p1,p2,p3,p4};
m=(1 0 0 0);
i(t1)={p1};o(t1)={p2};
i(t2)={p1};o(t2)={p3};
i(t3)={p2,p3};o(t3)={p4};
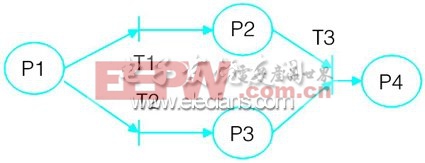
图1 petri网模型
petri网的执行过程受控于网中托肯的数量和分布情况,并通过转移的点火得以实现。一个转移可点火,首先该转移必须允许点火,即转移使能。一个转移使能的前提条件是该转移的每一个输入库所中被标记的托肯数至少等于该所到该转移的有向弧数。也就是说一个转移的所有输入库所中至少包括一个托肯(假设每条有向弧的权均为1)。体现petri网动态行为的启动规则是:若库所代表的条件满足,转移就点火,点火后转移的输入库所的托肯数等于原托肯数减去该库所到转移的输出弧数。转移的点火使petri网的标记由m转变为m’。
关联矩阵和状态方程是petri网分析和建模的主要工具,状态方程的表示为
m=m0+ct*uo
m,m0分别点火前后的初始标识集和结果标识集;ct为关联矩阵,u为点火序列,由0,1组成的n×1列矩阵。
1 引言
目前,对于机车故障检查与诊断存在各种方法,其中专家系统,故障树分析方法(fta),以及两者的结合体是被广泛接受的方法,然而,他们也存在一些缺陷;fta仅能表示逻辑关系[1],不能表示动态行为;而专家系统突出弱点就是知识获取的“瓶颈”问题[2];基于故障树的专家系统诊断系统在一些方面虽得到优化,但是由于故障树模型之间的缺陷,又加上诊断的规则数目较多,当添加修改规则时,易出现规则之间的冲突和冗余,无法保证专家系统高效、正确地运行。
在故障检测与诊断领域中,petri网不仅能够用图形符号表示故障事件系统逻辑关系,知识的完成和诊断推理,而且能够表示系统的动态行为,故petri网模型能够用于机车故障检测和可靠性的分析。
自1962年由carl adam petri提出petri网的概念以来,petri网己广1泛应用于计算机操作系统、通信协议、分布式数据库系统及任务规划和性能评价等领域。在此利用petri网的可达性和状态方程方法,分析故障树信息,解决故障检测和故障传播问题。与基于故障树的诊断方法相比,本文提出的方法具有结构表达图形化、 推理搜索的快速化以及诊断过程的数学化等优点。











评论