
嵌入式PLC芯片组实现kp3-05m06r型运动控制器
1 引言
本文引用地址:http://www.amcfsurvey.com/article/161404.htm 本文作者利用黄石市科威自控有限公司的嵌入式plc芯片组,设计出了kp3-05m06r型运动控制器。该控制器集plc、can总线、rs485/232等功能于一体,与步进驱动器或伺服驱动器配套使用,具有对步进电机或伺服电机进行点动、定位、脉冲正反插补、脉冲分频等功能。多个运动控制器通过can通信接口互连,其中一台运动控制器作为主站,其余运动控制器均作从站。该系统可接人机界面,实现工艺集中显示、控制和管理,如配备web服务器还可实现控制系统的远程监控和诊断。
2 运动控制器的功能
自2005年至今,kp3-05m06r型运动控制器在纺织、印染行业现场应用了数千台。实践证明该款控制器不但性能优越,而且使用和维护非常简便。其中主要参数如下:
输入:5路光耦+1路最高100khz脉冲信号。
输出:6路继电器+5路晶体管+1路0~10vdc +1路级连脉冲+1路分频脉冲。
通信功能:
can接口,波特率160kbit/s,可实现多个运动控制器互连;
串口0,可完成梯形图下载、监控、接字符屏或人机界面;
串口1,支持三菱fx2n计算机链接方式格式1的部分主从协议,按此协议可实现本运动控
制器与fx2n系列plc、操作终端或其他设备互连,完成信息交换、参数设置、异地操作等功能。
控制功能:
脉冲分频,频率=输入脉冲频率/k,其中4.000≤k∞,小数点后有效数字为3位;
脉冲点动,自动定位,直线插补;
编程语言:
梯型图语言,与三菱fx2n指令兼容。
3 硬件设计方案
3.1 主控制器及外围电路框图
主控制器及外围电路框图如图1所示。
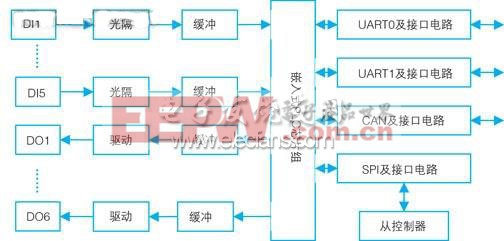
图1 主控制器及外围电路框图
3.2 从控制器及外围电路框图
从控制器及外围电路框图如图2所示。
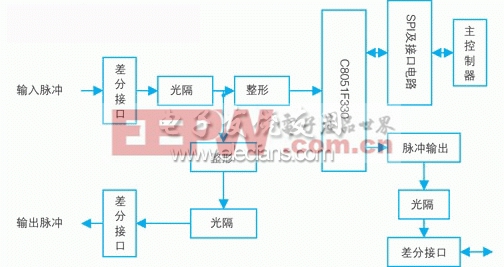
图2 从控制器及外围电路框图
linux操作系统文章专题:linux操作系统详解(linux不再难懂)






评论