
小型纺织绕线恒张力控制系统的研究和设计
摘要:针对非恒张力绕线将导致纱锭后续染色不均的问题,设计了一种小型简便的纱线传送和控制机构,利用霍尔效应制作的非接触式张力传感器获取纱线张力信息,经控制器采用模糊PID算法对张力轮电机进行转速控制来完成闭环的恒张力控制,并用Matlab仿真比较模糊PID算法和常规PID算法的优劣,为PID算法评估提供了很好的思路。
关键词:恒张力;霍尔元件;模糊PID;Mattab仿真
0 引言
目前纱锭二次绕线普遍在织布厂小批量染线过程中使用。二次绕线使用的恒转速传动是非常经典的控制环节。使用这种简单的控制方法,随着绕线圈数的增加,被纱线缠绕的塑料套筒张力发生变化,导致缠绕后的纱锭内紧外松,不利于后续浸染工序中染料均匀渗透塑料套筒外缠绕的纱线,降低了纱线染色的质量。此外,在染色后的纺织过程中,用松紧程度不一致的纱锭纺出来的布将出现表面凹凸不平整的现象,降低了布匹的质量。
因此,解决纱锭二次绕线恒张力问题是提高纱线染色均匀一致性和布匹平整度的关键。一般的恒张力控制机构比较笨重、复杂,考虑到工厂小批量染线的需求,机构设计应尽可能小巧、简便。张力传感器还要适用工业电磁干扰、油剂污染等恶劣环境。
1 恒张力绕线机机械结构
张力控制系统采用张力传感器测出纱线张力,并作为张力反馈元件,构成闭环控制系统。一次绕线机绕成的放纱筒竖立放在二次绕线机底部平台上。纱线通过弹簧夹持的摩擦片在电机M2控制的张力轮绕2圈,向上通过张力传感器检测纱线二次绕线的张力值,这个张力值作为反馈信号对张力轮进行速度控制。如果张力值有变化,将被传感器检测到,并将变化值送给单片机数据处理,单片机对采集的反馈信号进行A/D转换和PID处理,对执行部件M2电机控制输出的转速从而改变张力。
如M2M1,二次绕线卷筒和M2电机之间的纱线就会绷紧,缠绕二次绕线卷纱筒的纱线张力增大;如M2>M1,二次绕线卷筒和M2电机之间的纱线就会松弛,缠绕二次绕线卷纱筒的纱线张力减小。根据预先设定的张力值,进行PID控制,使恒张力传感器测得张力值在一定误差内保持和预设值尽可能接近。
2 张力传感器原理
为了绕线器达到恒张力控制的目的,首先张力传感器要能敏锐感知张力变化,为PID控制采集足够精确的张力变化数据。张力传感器的设计是实现精确控制的第一步,利用了霍尔效应,与一般张力传感器不同的是,霍尔元件与纱线无直接接触,可实现长期可靠工作。传感器用钢外壳封装,可防纺丝油剂污染。
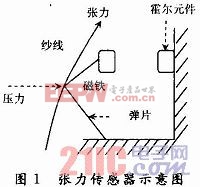
图1所示为张力传感器结构示意图。纱线压在弹片倾斜向上被拉向卷纱筒,受到沿纱线方向的张力,将张力沿垂直方向分解,纱线对弹片有向右的压力,弹片末端装有磁铁,右侧装有霍尔元件,当磁铁在压力下发生形变弯曲,向右靠近霍尔元件,霍尔元件感应到的磁场强度将发生变化,即张力的变化值等效为磁场强度变化量,从霍尔元件输出的磁场强度变化量为模拟量,传给单片机进行数据处理。
由于纺纱环境属强磁工作环境,霍尔元件采集数据也和磁场特性直接相关,因此要尽量避免电机磁场对传感器的干扰,因此将电机封装在闭合金属空间内,防止电磁场泄露对传感器的影响。
















评论