
基于DSP的电动车控制系统设计
1 引 言
2001年,美国发明家Kamen发明了一种新型的方便快捷的两轮交通工具“Segway”,行走平衡控制技术成为全球机器人控制技术的研究热点。以平行双轮电动车作为移动平台为机器人的研究提供了技术支持,同时由于他的行为与火箭飞行和两足机器人有很大的相似性,因而对其运动平衡控制研究具有重大的理论和实际意义。文献[2]介绍了平行双轮电动车的控制器电路,以C8051F020单片机为控制核心通过调整车体平台的运行位置,从而使车体平台始终保持平衡状态。然而其并没有考虑载人、载物的因素以及转向和特殊路面、打滑等方面。再者,作为一种交通工具,由于没有考虑初始自平衡的设计,将会给以后的产业化进程提出新的挑战。因此需要寻找控制方法、原理均不同的其他控制理论来设计,如模糊控制、智能控制等。
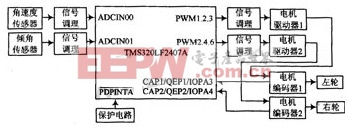
一般的单片或多片微处理器不能满足复杂、先进的控制算法时,DSP成为这种应用场合的首选器件。TI公司推出的面向运动控制、电动机控制的TMS320x24xx系例DSP 控制器,把一个16位的定点DSP核和用于控制的外设、大容量的片上存储器集成在单一芯片上,能够实现软件包括电动机状态值的采样与计算,控制算法的实施以及PWM信号的输出,此外还包括故障检测与保护、数据交换与通信等。与单片机相比,在电机控制系统设计中,采用TMS320LF2407A具有更有效的控制能力,从而减小整个系统的成本。
2 平行双轮电动车的组成
平行双轮电动车像倒立摆一样本身不能自然保持稳定,必须施加适当的手段才能使之稳定。他主要由车体平台,两只带光电编码器的小型无刷直流电机,左、右车轮和只有在静止状态才起作用的两只保护导向轮组成。两只无刷直流电机安装在车体平台的下面,通过齿轮减速机构分别独立驱动左、右车轮运动,具有尺寸小、操作灵活、节省能源等优点。
平行双轮电动车的行走机构如图1所示,是一种两轮同轴左右平行布置、独立驱动的结构,其行走机构控制的关键是两轮行走机构在行走过程中的平衡控制。平行双轮电动车行走机构要求具有如下优点:
(1)可以实现零半径转弯,具有极强的灵活性。由于只有两个轮子,因而结构尺寸可以做得较小,转弯时占用的空间也相对较小。这一特点使他适用在狭窄和移动中需经常转弯的空间(如仓库等)。
(2)三轮或四轮车辆在爬坡时重心会发生倾斜,因而对坡度有限制。平行双轮电动车在爬坡时上体姿态和走平路时一样,重心不发生倾斜,所以平行双轮电动车可适应更大的爬坡的坡度。
3 TMS320LF2407A
TI 公司的DSP产品TMS320LF2407A对电机的数字化控制非常有用。他将几种先进外设集成在芯片内,以形成真正的单芯片控制器,从而将DSP的高速运算能力与面向电机的高效控制能力集于一体,是目前最具竞争力的数字电机控制器。TMS320LF2407A主要特点:
(1) 采用高性能静态CMOS技术,使得供电电压降为3.3 V,减小了控制器的功耗;30 MIPS的执行速度使得指令周期缩短到33 ns(30 MHz),从而提高了控制器的实时控制能力。
(2)片内有高达32 kB的FLASH程序存储器,高达1.5 kB的数据/程序RAM,544 B双口RAM(DARAM)和2 kB的单口RAM(SARAM)。
(3) 两个事件管理器模块EVA和EVB,分别提供两个16位通用定时器;8个16位的脉宽调制(PWM)通道;3个捕获单元;10位的16通道A/D转换器。他们能够实现:三相反相器控制;PWM的对称和非对称波形的输出;当外部引脚PDPINTx出现低电平时快速关闭PWM通道;可编程的PWM死区控制以防止上下桥臂同时输出触发脉冲;片内光电编码器接口电路用于对光电编码器信号进行正反向计数。时间管理器模块适用于控制交流感应电机、无刷直流电机、开关磁阻电机、步进电机、多级电机和逆变器。
4 无刷直流电动机的DSP控制策略











评论