
基于模糊控制的高灵敏GPS接收机设计
摘要:为提高GPS接收机的灵敏度,采用模糊控制算法自适应调节接收环路的信号带宽,调和带内噪声控制与频率误差之间的矛盾。在GPS接收机设计中,通过降低环路带宽,抑制进入带内的噪声能量,提高环路信噪比,但在高动态环境下,为增加系统对频率误差的容忍度,就需适当提高环路带宽。采用模糊控制对接收环路的噪声带宽进行自适应调节,达到了提高接收机灵敏度的目的。仿真结果表明,该接收机系统性能比传统接收机在平方损耗及误码率等方面有不同程度的提高,使其更适用于高动态环境。
关键词:GPS;模糊控制;自适应环路;高灵敏度GPS接收机
0 引言
全球定位系统(GPS)是一种全球、全天候、实时、连续的高精度空基导航系统。作为一种通用的定位系统,全球定位系统具有许多其他导航设备无可比拟的优势。整个GPS系统由三个独立部分组成:空间星座部分、地面监控部分和用户设备部分。空间星座部分的各颗GPS卫星向地面发射信号;地面监控部分通过接收、测量各颗卫星信号,进而确定卫星运行轨道信息;最后,用户设备部分接收、测量各颗可见卫星的信号,并从信号中获取卫星的运行轨道信息,确定用户接收机自身的空间位置。用户设备也就是GPS接收机,主要由接收机硬件、数据处理软件、微处理器和终端设备组成。
现用来提高GPS定位性能的主要技术包括:差分GPS,GPS与惯性导航系统的组合和地图匹配三种技术。这些算法和技术直接求解出GPS用户所关心的定位、定速和定时结果。给定一组数目和质量完全相同的GPS测量值,采用不同定位算法和技术的接收机有可能获得差别很大的GPS定位性能。但是选定一种GPS定位算法和技术,使GPS接收机更快地捕获到更多颗可见卫星信号和从中获得更加精确的GPS测量值,是提高GPS定位精度的两种有效途径,而通过这两种有效途径设计接收机,对卫星信号的捕获与跟踪性能的提升较大。本文中采用模糊控制算法可在高动态、低信噪比条件下获得更精确的GPS测量值,从而提高接收机的灵敏度。
1 GPS接收机环路模型及问题分析
在GPS信号跟踪阶段,信号通道从捕获阶段获得当前这颗卫星载波频率和码相位的粗略估计值出发,通过跟踪环路逐步精细对这两个信号参量进行估计,同时输出各种GPS测量值。信号跟踪环路一般以闭环反馈的形式周期性连续进行,以达到对卫星信号的持续锁定。信号跟踪环路实际上就是由载波跟踪环路与码跟踪环路两部分组成,分别用来跟踪接收信号中的载波与伪码。
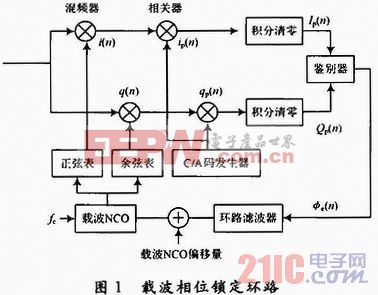
1.1 载波相位锁定环路
载波相位锁定环路的目的是尽量使所复制的载波信号与接收到的卫星载波信号保持一致,从而通过混频彻底剥离卫星信号中的载波。若复制载波与接收载波不一致,则接收信号不能被下变频到正确的基带频段,并会消弱码环所得的C/A码自相关幅值。GPS接收机载波环路通常采用I/Q解调法来完成对输入信号的载波剥离、鉴相和数据解调等任务,如图1所示。
系统输入的连续时间信号ui(t)可以表示为:
![]()
式中:D(t)表示调制在载波上的数据码;![]() 表示其幅值;sin(ωit+θi)为调制载波;n表示均值为零、方差为
表示其幅值;sin(ωit+θi)为调制载波;n表示均值为零、方差为![]() 的高斯白噪声。
的高斯白噪声。
I/Q解调的一个功能是将输入信号ui(t)中的数据码D(t)解调出来。输入信号在I,Q支路上分别与正弦载波复制信号、余弦载波复制信号相乘混频,所得的乘积分别为:

式(2)的最后一个等号右边的第一项为高频成份,第二项为低频成份。而ωe和θe分别为输入信号与复制信号之间的载波频率差和初相差。

















评论