
观测器方法在三相逆变器故障诊断中的应用介绍
1引言
本文引用地址:http://www.amcfsurvey.com/article/160067.htm近年来,随着控制理论的不断完善,控制系统的故障诊断方面的研究越来越引起了人们的重视[1][2],并且相继取得了很多研究成果[3][4][7]。然而,正如文献1中所提到,动态系统的故障诊断技术,目前取得的成果主要集中在线性系统上,而针对非线性系统的研究则鲜见于文献。更为重要的是,由于理论研究中对模型所做的假设在实际应用中经常得不到满足,因此给故障诊断技术的实际应用带来了巨大的困难。文献7从理论上对这种应用难度进行了探讨和归纳,对基于模型(尤其是通过观测器来进行)的故障诊断方法的设计方向和性能评价提供了有意义的指导。由于应用上的难度和电力电子本身存在的非线性等因素,电力电子作为现代控制中的重要技术手段,对其进行故障诊断方面的研究却迟迟没有进行。本文从理论和实际应用的角度出发,先对电力电子系统的故障进行了分析,然后针对具体的某一类故障,设计出一种基于模型的故障诊断方法。仿真结果表明,文中提出的方法是行之有效的。
2电力电子系统的故障分析
电力电子系统中故障的来源是多方面的,下面以一个常用的电压反馈型逆变器控制系统为例来分析主要故障。
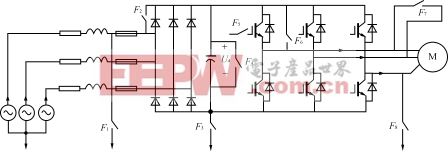
图1电力电子控制系统的常见故障

图1中列出了这个电力电子控制系统中通常可能出现的8种故障Fi(i=1,2,…,8),其中除F5故障用开关断开表示外,其它故障用开关闭合来表示。这些故障是:
SF1输入电压单相接地故障;
SF2整流二极管短路故障;
SF3直流接地故障;
SF4直流滤波电容短路故障;
SF5GTR基极开路故障(无驱动信号);
SF6GTR短路故障;
SF7电动机线间短路故障;
SF8电动机单相接地故障。
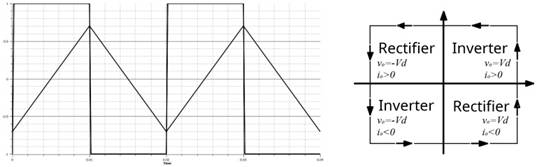
上面列出的故障没有考虑电机内部的故障。事实上,在电力电子装置的实际设计中会加上许多保护电路,如短路保护,过电流/电压保护等。然而,从容错控制和保护器件的角度出发,系统对这些故障进行检测和分离是十分有意义的研究工作。文献6中对其中最为重要的四种故障(F1、F2、F5、F6)在电路理论上进行了分析,但其分析只是概述性的,还有更多具体的工作需要进一步的研究。例如,如果GTR出现单臂基极开路故障,系统是能够继续降性能运行的,此时由于相电压中产生很大的直流分量,在电机上将产生直流脉动转矩,对系统是有害的,因此要及时分离出故障臂,排除故障。
31三相逆变器的Kalman模型
三相逆变器在正常工作时,其电路结构如图2所示。
图中Qi(i=1,2,3,4,5,6)是开关器件,电阻R为负载,电感L、电容C组成滤波电路(这样的负载在UPS中很常用),Us为直流侧的供电电源,在图1中为滤波电容两端电压Ud。
取电路中uc1,uc2,uc3,iL1,iL2,iL3作为状态量,U1,U2,U3作为控制量,iL1,iL2,iL3作为输出量,则系统可采用下面的Kalman模型进行描述:
x=Ax+Bu
y=Cx
式中:x∈R6,u∈R3,y∈R3,
A =∈R6×6,
=∈R6×6,
B![]() =∈R6×3,
=∈R6×3,
C![]() =∈R3×6,I3∈R3×3
=∈R3×6,I3∈R3×3









评论