
基于Simulink仿真的用户星天线控制系统分析
摘要:为满足中继卫星系统对天线指向精度的要求,首先描述了天线指向控制概念,对用户星与中继卫星星问链路的建立过程进行了分析,并且设计了星上自主控制方案,在Simulink环境下对所设计的天线指向控制系统进行了数学仿真,最后通过对仿真结果的分析验证了用户星天线控制系统的跟踪性能。
关键词:控制方案;Simuhnk;跟踪性能;天线指向
0 引言
伴随着我国中继卫星系统的建立和发展,跟踪与数据中继成为当前航天工程中的一个研究热点,其中一个重要的研究课题是用户星天线对中继星的精确指向跟踪。由于中继卫星系统对天线指向精度要求小于等于0.05°,因此卫星在高精度姿态控制的基础上,还需要增加天线跟踪控制器对天线进行单独控制,才能满足中继卫星系统中星载天线的跟踪指向要求。
星间天线的相互跟踪可以使用程序跟踪方式和自动跟踪方式,由于中继卫星与低轨航天器间传输数据速率高,天线波束宽度窄(Ka频段)只靠程控跟踪实现星间Ka频段天线的相互跟踪,天线指向损失较大,进而对星间链路性能影响较大,所以星间天线常使用自动跟踪模式实现相互跟踪,星间天线的相互自动跟踪主要是由自动角跟踪系统来完成的。
1 天线控制系统的组成
1.1 天线控制系统的指向策略
天线伺服跟踪系统组成如图1所示。
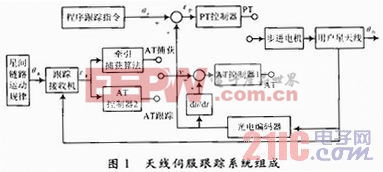
当用户星天线与中继卫星建立联系之前,需要将卫星单址天线指向目标。由于初始偏差很大,卫星根据轨道预报给出的目标轨迹及天线当前的位置,输出控制命令,驱动天线转动,从而使天线在规定的时刻指向预报的正确方向。这一过程称为天线的程控指向模式。
由于卫星轨道预报误差、卫星姿态误差、天线机构及控制等误差的存在,使得天线程控指向角与真实的卫星指向角有一定的偏差,从而造成目标卫星不能出现在跟踪天线的半波束范围内,也就是说,跟踪天线未能捕获目标卫星。为了捕获目标,必须在跟踪天线的指向附近做小范围的扫描搜索,即用户星的捕获牵引模式。
当天线指向与中继卫星视线之间的误差角小于某一给定值,此时跟踪接收机接收到的目标信号达到某一门限值,系统转入自动跟踪模式。在自动跟踪模式下,跟踪接收机通过对天线馈源产生的和信号、差信号进行单通道调制和基带信号处理,完成对接收信号载波频率的捕获跟踪,最后由误差提取电路分离出方位、俯仰误差信号,送往伺服控制单元,驱动天线向误差减小的方向转动,完成自动跟踪。
在用户星天线坐标系内,用户星指向中继星的天线指向方位角和俯仰角与天线电轴夹角的关系为:

终端天线准确指向中继卫星波束时,Ka喇叭只产生和模信号es,当终端天线指向偏离中继卫星新标波束时,将在Ka馈源喇叭中激励起差模信号ed,差模信号中含有方位差信号和俯仰差信号。

1.2 跟踪接收机
跟踪接收机的任务就是从输入和信号es与差信号ed中,检测出方位误差和俯仰误差的电压值。
和、差信号分别经过低噪声放大K∑,K△后,再对差信号进行四相调制,然后合成一路信号:
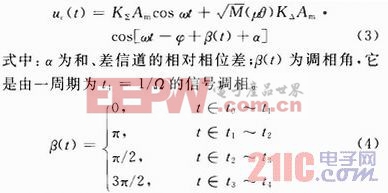
















评论