
基于LEA-6R的惯性导航系统设计与实现
摘要 为了在隧道,城市高楼间能快速获得理想的GPS定位数据,设计并实现了基于U—Blox公司LEA-6R芯片的高灵敏度传感器组合惯性导航系统,文中介绍了外围电路,天线监管电路和在WinCE6系统下的程序设计、实践证明,在卫星不可见的情况下,该系统仍能在隧道和城市高楼中不间断地计算出准确的定位数据。其定位精度满足正常的需求。
关键词 陀螺仪;惯性导航;UBX协议;通讯
现代卫星导航系统是目前世界上最先进的导航系统之一。现代卫星导航系统定位精度高,但无法连续提供运载体位置信号,同时,当运载体产生剧烈动作或当导航星全球定位系统信噪较低时定位精度将大幅降低。惯性导航是完全自主式的导航技术,惯性导航仅仅依靠陀螺仪等设备进行导航。但惯性导航的误差将随时间而发散。将卫星定位系统与传感器惯性导航技术组合,组合后的卫星/惯性导航系统能改善导航位置和速度信息的精度,从而改善导航系统性能。作为车载导航时,在卫星不可见的隧道、地下停车场,城市的高楼间,仍将取得较好的定位数据。卫星/惯性组合定位系统是目前导航系统重要的研究内容之一。
U—Blox公司提供的LEA-6R GPS芯片,将外部传感器的信号和接收到的GPS信号相组合,较好地提供了实现GPS和传感器惯性导航技术组合的平台。
1 车载传感器组合惯性导航系统设计
1.1 LEA-6 R
U—Blox公司的产品是全球灵敏度最高的民用级芯片,跟踪灵敏度可达-162 dBm。产品支持标准NMEA Protocol协议和公司自定义精简的UBX Protocol通讯协议。在该公司的KichStart×信号捕获加速引擎的支持下,可快速捕获微小的信号。LEA-6R能实现2.5 m高精度GPS/1 m伽利略双系统混合精确定位,并采用革新的多径检测以及消除技术,在高动态环境、5 Hz的数据刷新率下,仍能保持较高的定位精度。LEA-6R芯片内部的Flash中集成了U—Blox公司专用的传感器与惯性导航融合技术。通过将高性能U—Blox 6定位引擎与U—Blox的惯性导航技术相结合,配以少量的外围传感器电路,即可在隧道、深度室内和高楼林立的城区等地点实现不间断地精确导航。
1.2 系统组成
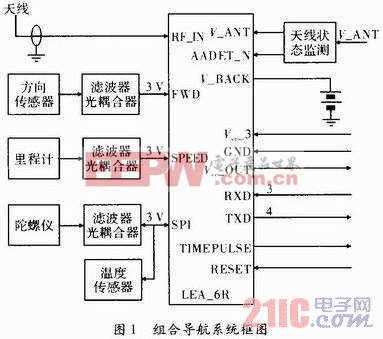
LEA-6R芯片与有源天线、天线监测电路、方向传感器、陀螺仪、温度传感器、里程计共同构成传感器组合惯性导航系统。LEA-6R和U—Blox公司其他系列芯片相同,都具有USB接口,R-232接口,可方便的与主机通讯。LEA-6R总体框图如图1所示。
1.3 天线监测电路设计
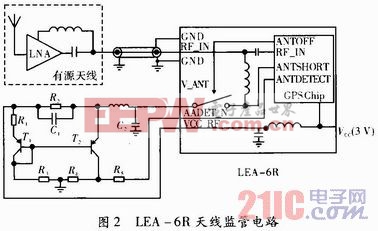
LEA-6R支持无源天线和有源天线。有源天线的内部设有一个低噪声放大器(LNA),用于补偿信号的衰减,提高信号的信噪比,增加CPS的灵敏度。在采用有源天线的同时,为防止有源天线内部的放大器短路和开路时损坏或影响GPS的正常工作,LEA-6R内部设置了天线监管器,提供了天线关断及短路检测功能。开路检测由外部电路输入到AADET—N端进行检测完成。GPS内部的天线监管器和外围的开路检测电路,能有效地防止有源天线在短路或开路时损坏GPS芯片。天线监管电路如图2所示。













评论