4 控制逻辑
为了方便人能更加简单的控制四旋翼,文中加入了控制逻辑。操作者面北朝南,飞机机头可以在你前方的任意一个方向,操作者只要按自己的方位进行前后左右控制。
公式推导:Vxcmd和Vycmd是操作者控制输入。
首先将速度分解到飞机所在的地轴系下:
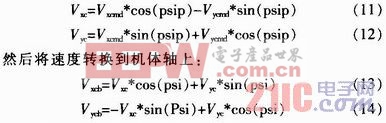
最后将速度送入控制器进行控制。
5 结论
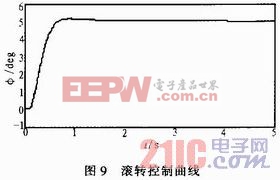
PID控制器能有效的控制四旋翼无人机的姿态角和速度,而且当四旋翼的重心发生偏移时,虽然控制的快速性有所下降,但控制效果依然满足要求。
pid控制相关文章:pid控制原理
pid控制器相关文章:pid控制器原理




















评论