
基于多Agent的传感器管理系统研究与设计
本文提出了一种传感器管理系统框架,给出了基于多Agent的解决方案。该结构通过多个Agent间的相互协商来实现传感器任务的分配,较好地克服了在融合中心存在的缺陷。并在此基础上着重探讨各Agent之间的协调合作问题,实现了基于KQML语言的各Agent之间的协调机制。
本文引用地址:http://www.amcfsurvey.com/article/159640.htm1 引 言
多传感器系统能从不同的角度和视野获取其观测环境更多的全局信息,在军事和民用领域正受到越来越广泛的重视。为适应现代战场变化,获得最佳的作战效果,许多研究人员开始把注意力放在对传感器资源进行自动或半自动管理的研究上,充分发挥各个传感器的效能。与此同时,随着指挥自动化建设的不断前进和更新,越来越多的遗留系统摆在研究人员的面前,如何合理利用这些遗留系统也是科研人员需要解决的一个问题。一个方案就是包装遗留部件,为他们提供“Agent层次”的功能,使得它们可以和其它的软件部件进行通信和合作。
2 传感器管理现状
传感器管理的核心问题就是依据一定的最优准则,确定目标选择何种传感器以及该传感器的工作方式及参数。传感器管理系统(SMGS)的任务就是利用有限的传感器资源,满足对多个目标和扫描空间的要求,以得到各具体特性的最优度量值(检测概率,截获概率,传感器自身的发射能力,航迹精度或丢失概率等),以最优准则对传感器资源进行合理分配,选择传感器的工作方式和工作参数。目前的传感器管理的结构则分为集中式和分布式。
2.1集中式管理结构
在集中式管理结构中,由融合中心向所有的传感器发送其需要执行的任务和完成该任务的参数集或运行模式。其缺点是融合中心难以对各个传感器的负载情况做出实时的*估,在多任务时会造成负载不均衡,甚至会造成个别传感器严重过载而无法完成任务,另外,当传感器数目增多时,融合中心的计算量会急剧上升,通讯量也会大大增加。
2.2分布式管理结构
在分布式管理结构中,将管理功能分布在系统的不同位置或不同传感器中。其不足是信息冗余会带来严重问题,此外,如果没有一套公共的通讯设施,网络中各节点之间的数据交换只能严格按端到端的方式进行,发送端与接收端之间的延时会产生网络中不同部件的全局状态出现瞬间的不一致,从而导致系统整体性能的下降。任务冲突和竞争使任务协调变得更加复杂。
Agent是来自于分布式人工智能的一个概念模型,通常是指具有目标、行为和知识,能在不确定性环境中,根据自身能力、状态、资源、相关知识以及外部环境信息,通过规划、推理和决策实现问题求解,并进行相应的活动,自主地完成特定任务并达到某一目标的实体。
多Agent系统(MAS)是一组为实现某一全局目标,通过通信网络或计算机网络相互连接起来的系统。其中的各Agent必须相互协商、协调和协作才能完成共同的任务,以实现全局目标。MAS以其适应环境的动态自组织能力和开放式的基础结构而在许多领域受到重视。
3.1 系统构架及特点
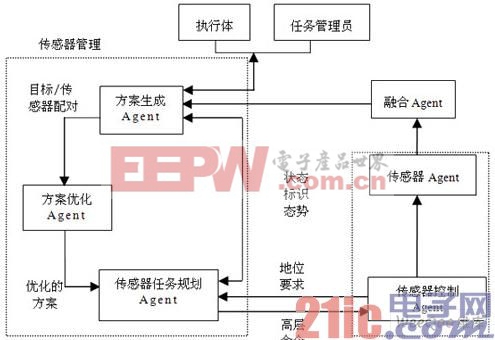
图1 传感器管理系统(SMGS)的任务流程与外部接口关系
⑴决策过程分布在网络上的各节点中,这种策略允许发挥各传感器节点自身的管理潜能(局部管理器对其自身的传感器任务进行决策);
⑵全局系统任务管理器仅需对所属传感器提出任务要求,然后对系统任务的完成情况(性能指标)进行监控,不需对传感器进行具体的管理;特别值得强调的是,由于传感器Agent的设置,使传感器具有高度的自主性及与设备无关性(传感器与融合节点之间以及传感器之间的信息交换可通过基于标准化的请求/响应查询语言及情报数据链实现),这为传感器的机动组网创造了有利条件;
⑶系统中的每个节点对应于一个物理实体或决策实体,它们之间通过消息进行协调,系统容易构造;
⑷采用基于多Agent的系统,决策者在模型系统上所作的决策能够很快在实际运行中实现,易于实现;
⑸一般的模拟方法只能*估事先设定好的决策方案的效果,而不能建议产生新的方案,即只能回答“what-if”的问题,而不能回答“what’s best”,多Agent系统为回答“what’s best”问题提供了可能性。











评论