
基于FPGA的模糊PID控制器设计
摘要:针对实现传统模糊PID控制器时,需要建立比例、积分和微分三个模糊控制器,存在模糊规则较繁杂、运算量大、速度慢等问题,提出了以PD模糊控制器代替P1模糊控制器,采用两个PD模糊控制器,并引入FPGA技术,实现模糊PID控制器。通过QuartusⅡ和Matlab联合仿真,比较了基于FBC和SBC实现的模糊PID控制器的控制效果,验证了设计方案的正确性和可行性。
关键词:模糊PID;控制器;FPGA:QuartusⅡ;Matlab
0 引言
采用常规方法实现模糊PID控制器,通常需要设计比例、积分和微分三个模糊推理系统,由于每一项都需要相应的模糊控制器和模糊规则,存在运算量大,求解时间长,响应过程慢等问题,而且大量的模糊规则在实现时也需要消耗较多的逻辑资源。如果采用并行结构,以并行方式将PD模糊逻辑控制器PDFLC(PDFuzzy Logic Controller,PDFLC)和PIFLC,两个模糊逻辑控制器模块的输出进行叠加,实现PIDFLC,同时引入FPGA技术,便可以解决上述问题。通过QuartusⅡ和Matlab联合仿真,对设计方案进行了验证。
1 基于FPGA的模糊PID控制器实现原理
基于FPGA的模糊PID控制器的芯片结构如图1所示。控制器的输入量是控制对象的实际输出量yp(t)与期望输出量yD(t)的差值。控制器还需要接收4个8 b的数字信号,即表示比例增益KP、积分增益KI、微分增益KD和输出增益KO的信号;此外还要有2 b的模式选择信号,通过逻辑组合,选择控制器的类型(PIFLC,PDFLC或PIDFLC的一种)。

在设计模糊PID控制器时,为节省FPGA的逻辑资源,一般不选择含有三个模糊控制器的方案,而采用并行结构,将PDFLC和PIFLC两个模糊控制器模块的输出相加,来实现PIDFLC。基于这种设想,先将PD控制器转变成PI控制器,再将二者叠加。式(1)为PD控制器的位置表达式,式(2)为PI控制器的增量表达式。
u(n)=KPe(n)+KDr(n) (1)
△u(n)=KPr(n)+KIe(n) (2)
式中:e(n)为采样误差信号;r(n)为采样误差的变化率;△u(n)为控制量的增量。比较式(1)和式(2)可知,位置式的PD控制器可以转换成增量式PI控制器,条件如下:
①r(n)和e(n)交换位置;
②KI取代KD;
③△u(n)取代u(n)。
图2为基于上述原理的控制器的结构图,图中对PDFLC的输出端求和(虚框部分),以代替PIFLC。
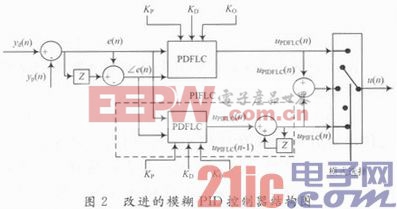
每一个PDFLC模块均采用两输入单输出的Mandani型模糊推理系统,输入的两个信号分别为误差信号和误差信号的变化率。在进入模糊化之前,每一个输入变量均乘以一个来自于PDFLC内部的增益系数(KP和KI或KP和KD)。同样,模糊化后输出值也需乘一个来自于PDFLC内部的增益系数(KO),PDFLC和PIFLC的输出(uPDFLC和uPIFLC)之和作为PIDFLC的输出(uPIDFLC)。模式选择控制端的输入变量决定输出模式。由图2可见PDFLC模块是控制器设计中的核心,主要包括增益、模糊化、模糊推理和解模糊化模块。

pid控制器相关文章:pid控制器原理








评论