
碟式斯特林太阳自动跟踪控制系统设计
2.4 碟转向机构
在时刻t,太阳的高度角h和太阳的方位角α分别为:

其中,φ为当前碟安装地点的地理纬度,δ为太阳的赤纬角,ω为太阳时角。
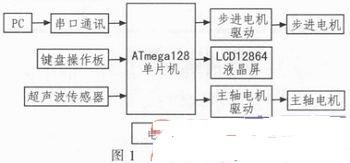
碟转向机构主要由水平方向调整电机、俯仰方向调整电机和减速箱组成。当ATmega128单片机根据M12模块得到当前位置的经纬度和时间,根据公式(1)、(2)计算出当前的太阳高度角增量和方位角增量,输出一定数量的PWM信号,驱动电机在水平和俯仰两个方向上进行调整,实现对太阳的初步跟踪。
2.5 反馈调整部分
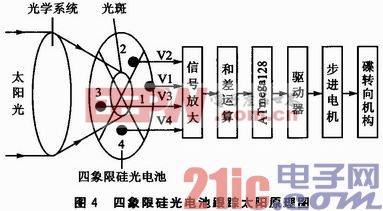
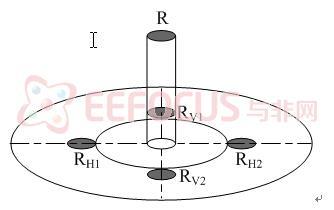
如图4所示,系统采用四象限硅光电池作为太阳跟踪误差校正用传感器。假设太阳光经光学系统在四象限硅光电池上成一圆斑状的光斑且分布均匀,设其中心坐标为(X,Y)。当碟式聚光器对准太阳时,四象限硅光电池的光轴对准太阳,圆斑的中心在光轴上,四个象限的硅光电池接收到相同的光功率,输出相同的电压信号,经过和差运算放大器对信号处理后,输出为零。当碟式聚光器未对准太阳时,即四象限硅光电池的光轴未对准太阳,则太阳光与光轴成一角度θ,光线经光学系统照射到四象限光电池上形成的光斑必然发生偏移(X≠0,Y≠0),则各象限光电池产生的电压不尽相同。和差运算放大器的输出也随之产生相对位移方向上的正负变化,ATmega128单片机根据该变化计算出需要调整的角度,输出PWM信号,使俯仰角电机和方位角电机转动,直到和差运算放大器输出为零,表明系统已经对准太阳。根据以上原理即可对碟式聚光器位置误差进行校正。本文引用地址:http://www.amcfsurvey.com/article/159588.htm
2.6 触模屏
触模屏主要用来对碟式斯特林系统进行参数设置或运行控制,并对系统的实时运行状态输出显示,是一个带触摸功能的工业平板电脑。与ATmega128单片机之间通过RS-232进行信息交换。
3 系统软件描述
ATmega128单片机软件开发采用Atmel公司的AVR STUDIO3.53集成开发环境,提供AVR ASSEM-BLER编译器、AVR STUDIO调试功能、AVR PROG串行/并行下载功能、JTAG ICE仿真功能,本设计采用的是JTAG ICE仿真调试。软件设计包括单片机初始化设计、GPS模块接口程序设计、主程序设计和上位机程序设计。
3.1 单片机初始化设计
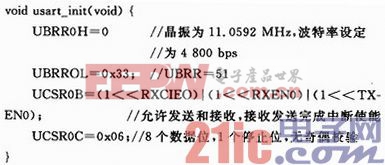
ATmega128单片机在工作前,需要对其进行初始化,主要设置ATmega128单片机以及外设的工作方式,使其能满足系统工作要求。初始化工作主要有I/O端口初始化、ADC初始化、PWM初始化和串行口初始化等。其中串行口初始化usart0_init()的程序如下:
3.2 GPS模块接口程序设计
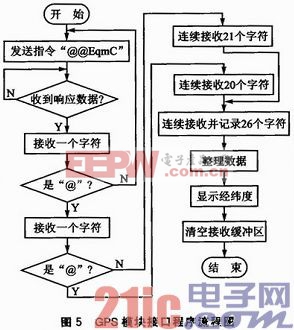
系统只需要M12模块提供经纬度,单片机与M12的接口程序流程如图5所示。ATmega128首先请求M12模块输出定位数据(向M12模块发出指令“@@EqmC”),然后等待M12模块回送数据。当M12模块回送数据后,ATmega128首先做出判断,确认其收到的是否为预期的定位信息,然后将定位信息(经纬度数据)截取下来,最后将串口的接收缓冲区清空,以免下次接收信息时出错。


评论