
基于ATmega16L的电液伺服控制系统设计
摘要:针对电液伺服闭环控制过程中,设定信号不断发生变化,电液阀门位置定位精确度较低的难题。采用ATmega16L作为核心控制器,并配有高精度A/D、D/A转换器,通过对阀门开度控制信号和位置反馈信号进行采集、转换、计算和比较,发出控制信号决定并执行换向阀的换向、交流伺服电动机的起停运转,推动液压缸推杆的伸缩,进而对阀门转角大小、开度百分比进行精确定位。
关键词:单片机微处理器;伺服控制;阀门位置;RS 485通信
0 引言
随着电力电子技术、电机控制技术、计算机技术和传感器技术的发展,交流伺服控制技术已逐步取代了传统的直流控制技术,越来越多地应用到各种工业控制领域中。现代制造行业的迅速崛起,对伺服控制系统的控制性能提出了更高的要求。要求提高伺服系统的移动速度、跟随精度和定位精度。而提高伺服控制系统的动态性能主要有以下两个途径:一是采用高性能的伺服电动机和测量装置,提高伺服控制系统的硬件性能;二是采用新的控制策略,提高软件系统的性能。本设计采用了性价比较高的单片机控制器取代传统的运算放大器实现信号的处理,智能控制器具有很强的数据采集、处理、记忆、存储及通信等功能,具有较高的精度、较好的人机界面和故障诊断能力。
1 电液伺服控制系统的硬件设计
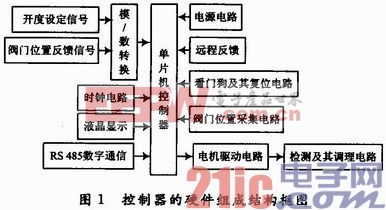
硬件电路由ATmega16L控制器及其最小系统、信号检测模块、PWM输出缓冲模块、驱动电路、RS 485通信模块、液晶显示及按键模块组成。其中,ATmega16L控制器最小系统包括单片机复位电路、电源配置电路、时钟电路等。图1为控制器硬件组成结构框图。
1.1 ATmega16L控制器及其最小系统电路设计
本系统给定阀门开度指令信号,通过检测位置和转速信号形成闭环系统,输出PWM控制信号,通过驱动电路和控制主电路开关管,进而控制电机的转速和阀门的开度。位置和转速信号的输入要用到ADC转换模块。
1.2 阀门位置信号采集电路设计
在阀门智能控制系统中,通过控制液体的流量和压力等参数来控制阀门开度值。调节管道系统中介质的流量,从而使控制参数符合要求。远程控制中心送来的设定信号可以是标准的DC 4~20 mA的电流信号,也可以是1~5 V的电压信号。键盘设定的0~100 %的开度百分比,智能电液执行机构控制器通过状态选择开关键来接收控制信号。
1.3 检测及信号调理电路设计
系统中需要检测的信号包括负载电流、负载电压、主电路母线电压、电机转速信号等。
电流检测采用霍尔电流传感器,霍尔电流传感器是一种利用霍尔效应工作的非接触式传感器,具有精度高、线性好、频带宽、响应快、过载能力强和不损失被测电路能量等诸多优点,并且已经有比较成熟的工业产品。
电流检测的霍尔电流传感器匝比为2 000:1,传感器送出的弱电流信号经过调理后便可送入控制器中进行运算,由式(1)可得。霍尔输入经过电阻后得到±2.5 V的电压Ui,经过偏移(TL431的输出电压为2.5 V)后在A点得到0~2.5 V的电压UA,经过运算放大器放大后在输出端得到0~2.5 V的电压Uo,可直接送入ATmega16L中进行处理。此处后级运放的倍数可通过电阻匹配实现,所以同种电流可用于多处电流检测中。根据运算放大器虚短、虚断的概念,计算过程如下:

1.4 驱动电路设计
驱动电路主要作用为将控制输出信号放大并驱动功率晶体管。它输出的脉冲幅值、波形直接影响到功率晶体管的开关特性、整机效率与调节特性。
本设计采用单相电压型桥式逆变电路,功能是将控制板送过来的功率较小的信号放大为能驱动IGBT开通关断的功率较大的信号。对前级控制电路输出的PWM信号进行光耦隔离。
1.5 PWM信号输出缓冲电路
单片机引脚输入电压为0~5 V,为避免测试或使用过程中将单片机引脚烧掉,所以在单片机的PWM输出引脚后可加一级缓冲电路后再送入驱动电路中。这样,一方面避免单片机引脚直接与驱动电路相连,另外一级非门缓冲电路可增加PWM信号的驱动能力。
2 电液伺服控制系统的软件设计
软件程序模块主要包括:系统自检及其初始化模块、数据信息采集模块、键盘的操作及其处理模块、(零点、灵敏度、行程)主要参数调节模块、系统监控程序模块等。











评论