
基于滑模控制的TSMC-PMSM调速系统
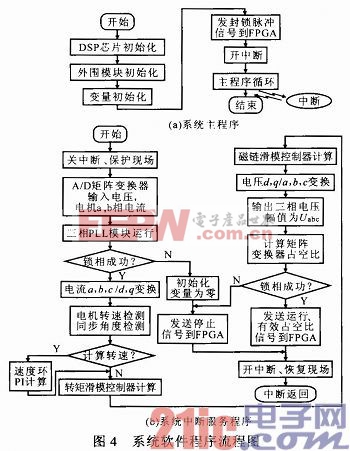
TSMC主电路由整流级、箝位电路以及逆变级构成。逆变级由PM75RLA120型IPM组成的通用逆变器构成,其自带驱动电路,极大地简化了驱动电路的设计。整流级由12个分立式1MBH60D-100型IGBT构成,共发射极连接构成双向开关。采用集成驱动芯片M57962驱动。此系统软件程序流程图如图4所示。本文引用地址:http://www.amcfsurvey.com/article/159524.htm
系统控制对象PMSM参数为:额定电压220 V;额定电流3.2 A;额定转速3 000 r·min-1;定子电阻2.4 Ω;直轴电感8.62mH;交轴电感10.5mH;极对数为2。系统TSMC输入端滤波电感大小为0.8mH;滤波电容为30μF;开关频率为10kHz。通过实验得到波形如图5,6所示。
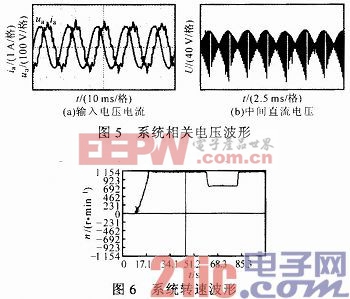
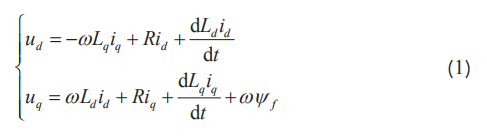
图5a为TSMC整流级输入a相电压电流波形。由图可见,此时电压相位超前电流,这是由TSMC输入端滤波器呈容性所致,但超前相位较小,输出侧基本呈单位功率因数。图5b为闭环调速时TSMC中间直流电压波形。图6为实际转速波形。实验过程中,系统初始转速给定为零,在10 s时刻转速给定切换为1 125 r·min-1,在60 s时刻转速给定切换为750 r·rain-1,之后在80 s时切换回1 125 r·min-1。由图可见,系统在转速突变时动态响应很快,稳态转速误差小,无抖振,具有较强的鲁棒性。
6 结论
这里设计了一种基于双级矩阵变换器的永磁同步电机滑模变结构直接转矩控制方案。该控制方法克服了滞环直接转矩控制中转矩和磁链脉动大的不足。针对一般滑模控制器的抖振问题,设计了积分滑模面、符号函数平滑和变指数趋近率,解决了滑模变结构固有的抖振问题。设计并实现了实验样机,实验结果验证了永磁同步电机的高性能调速,同时网侧基本实现了单位功率因数,达到了很好的实验效果。
















评论