
简易智能电动车的设计
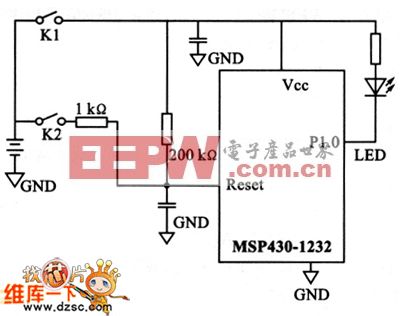
单片机MSP730F2274外接各种传感器电路和显示电路,其中金属探测电路和距离测量电路是信号输入,显示电路是信号输出。为了方便单片机引脚的使用,我们将单片机的所有引脚用接口引出。图2为控制电路模块电路图。本文引用地址:http://www.amcfsurvey.com/article/159464.htm
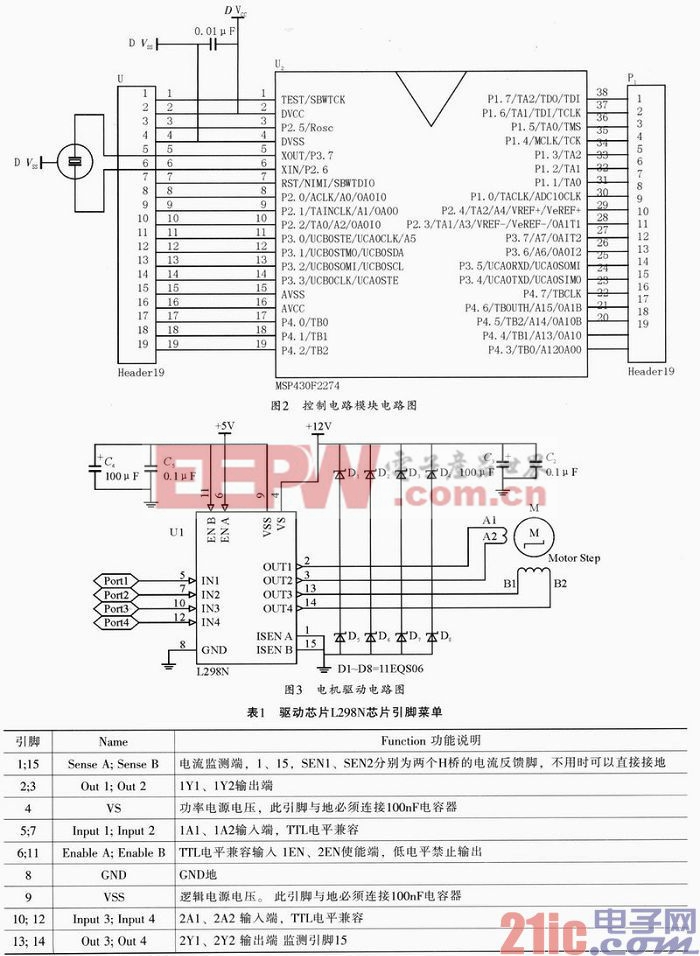
2.2 电机驱动电路的设计
电机的驱动芯片选用L298N。工作稳定电机驱动信号由单片机提供,信号经过光耦隔离后,传至PWM控制芯片L298N,通过L298N的输出脚与两个电机相连。此电机驱动电路如图3所示。
芯片引脚情况如表1所示,11脚为高时,当10脚电平高于12脚时,13脚,14脚端电机正转;12脚电平高于10脚时,电机倒转;11脚为低时,电机自由控制。
2.3 显示模块的设计
液晶显示模块以其微功耗、体积小、显示内容丰富、模块化以及接口电路简单等诸多优点在科研、生产和产品设计等领域中发挥着越来越重要的作用。
本系统中采用液晶屏来显示时间、路程、小车与起跑线的距离等信息。
图4所示为液晶与MSP430F2274的连接图。为节省I/O口,采用串口方式与单片机通信。

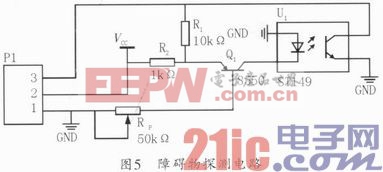
2.4 障碍物探测电路的设计
小车行驶线路中,有两个障碍物,要求小车绕过障碍物,避免与障碍物相撞。为了检测障碍物并确定障碍物的距离,在小车的前方安置两个红外线发射与接收电路。图5为障碍物探测电路。调节其电位器,可以改变红外发射与接收的距离。将红外检测到的信息发送到MSP430F2 274,并通过控制电机避开障碍物。
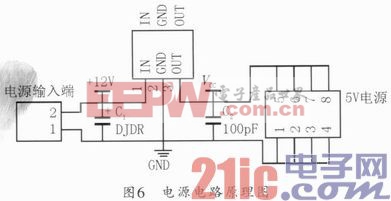
2.5 电源模块的设计
本系统要求有3.3 V,5 V,9 V混合输出可充电蓄电池电源。我们采用了一个蓄电池储存电提供系统用电要求,所以要设计一充电电路,由于单片机MSP430F2274需要工作在3.3 V的电压下,以达到低功耗的目的,而一些传感器,液晶等外围设备需要5 V与9 V的工作电压。所以我们利用一个7805三端5 V稳压管、一个7812三端12 V稳压管和一个AMS1085CT三端3.3 V稳压管做为电路主要组成部分。电路原理图如图6所示。










评论