
无刷直流电机直驱抽油机系统控制器设计
2.3 正反转控制设计
本设计用两个霍尔位置传感器H1,H2和两块磁铁CT来实现电机的正反转,两个霍尔位置传感器H1,H2分别安装在抽油机架的上下止点,磁铁CT安装在平衡重块的上下两面各一块,位置信号处理电路如下图3所示。
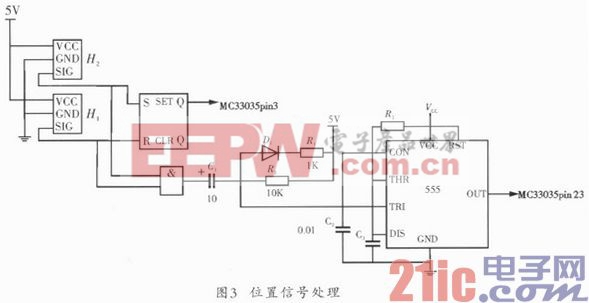
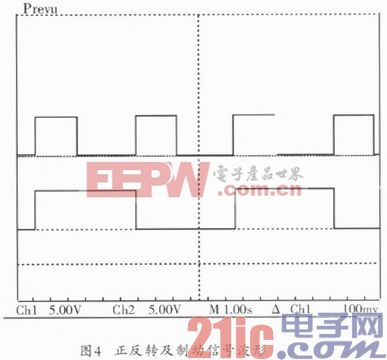
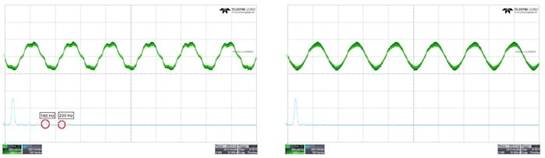
当CT随电机的转动靠近H1时,H1输出低电平,H2输出高电平,触发器输出低电平,H1,H2的输出信号经与门后为低电平,南于5 V电压源的升压作用,使定时器输入端由低电平瞬间变为高电平,所以其输出暂稳态(高电平)结束后自动进入稳态(低电平),当电机反转至CT接近H2时,H2输出低电平,H1输出高电平,触发器输出高电平,H1,H2的输出信号经与门后仍为低电平,所以电机仍是由高电平变为低电平,转向信号和制动信号波形如下图4所示,波形1是制动信号,高电平制动且优先级最高,波形2是转向信号,高电平时电机正转,低电平时反转,假设电机正转,正转过程中波形2为高电平,波形1为低电平,到指定位置后波形2变为低电平,波形1为高电平,由于波形1优先级高,它为高电平时间内波形2无效,此段时间是电机的正向制动过程,制动一定时间后波形1自动变为低电平,波形2的低电平起作用,电机开始反转,反转过程中波形1、2都为低电平,反转到指定位置后波形2变为高电平,波形1也变为高电平,电机进入反向制动过程,制动一定时间后波形1自
动变为低电平,波形2的高电平起作用,电机开始正转,如此反复,其状态变化过程为:正转→正向制动→反转启动→反转→反转制动→正转启动→正转。

霍尔传感器相关文章:霍尔传感器工作原理
电荷放大器相关文章:电荷放大器原理 霍尔传感器相关文章:霍尔传感器原理





评论