
基于电磁传感器的智能车控制系统设计
2.2.1 元件选择
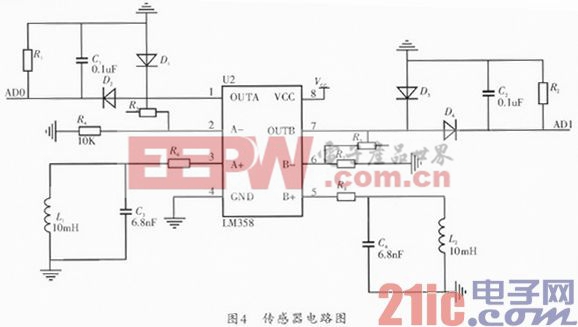
电磁传感器检测赛道信息的原理是通过电感和电容组成的LC谐振电路检测赛道的信号,然后将检测到的信号通过运算放大器LM358进行放大,由于小车需要识别的频率为20 kHz,所以在谐振电路中,选取10mH的细绕组电感、6.8 nF的低频瓷介电容。
2.2.2 电磁传感器的排列方式
电磁传感器在小车前方一字形均匀布局简单排布。这种信息检测方法相对连贯、准确,使控制程序算法简单,小车运行稳定。传感器电路图如图4所示。本文引用地址:http://www.amcfsurvey.com/article/159461.htm
2.2.3 起跑识别装置
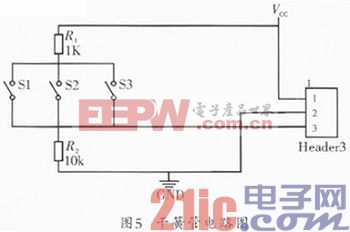
电磁组起跑线安装的是永久磁铁,永久磁铁的数据:直径:7.5-15mm;高度:1-3mm;表面磁场强度:3000-5000Gs。磁场检测电路尚不能够直接用于检测起跑线的永磁铁,所以选择干簧管检测起跑线。当干簧管置于磁场中时,两极吸合,干簧管导通。如果在其两端加上限流电阻和电极,就可以实现脉冲输出到单片机进行中断控制,在程序中控制小车的延时、起跑和停止。干簧管电路如图5所示。
2.3 车速检测模块
本系统选择日本OMRON公司生产的E6A2CW3C增量式光电编码器测速。光电式旋转编码器由光栅盘和光电检测装置组成。光栅盘与电动机同轴,电动机旋转时,通过计算每秒光电编码器输出脉冲的个数就能反映当前电动机的转速。该编码器提供两相输出,体积小,质量轻,线数多,能够满足需要。另外,专门选用了齿数较少的传动齿轮,有利于提高编码器与电机的转速比,使相同速度下采到的脉冲数更多,有效提高了速度反馈的精度。
2.4 电机驱动模块
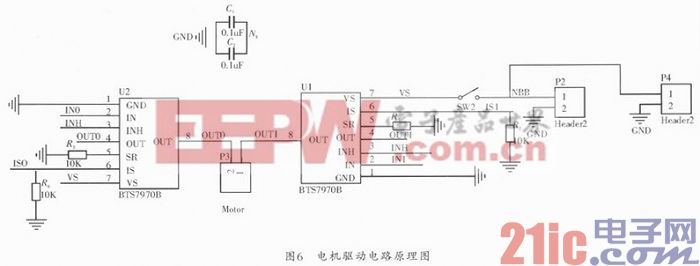
本系统电机驱动选择英飞凌公司的BTS7970B驱动芯片,由单片机的PWM模块发出不同占空比的PWM信号来控制行进电机的转速。BTS7970B芯片通过PWM信号开启关闭通道,输出不同电压控制行进电机。由于BTS7970B是半桥芯片,驱动电路使用两片BS7970组成一个全桥用以驱动电机,驱动电路原理图如图6所示。
2.5 舵机控制模块
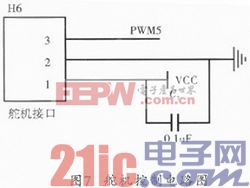
本系统舵机控制模块的控制对象是比赛组委会提供的S-D5型数码舵机,该舵机可以输出力矩驱动智能车转向。图7为舵机硬件电路,其中控制信号线与MC9S12XS128的PWM5相连。
















评论