
基于口令识别的无线控制系统的设计
摘要:文章将口令识别与无线通信、机器人控制相结合,实现了基于口令识别的智能车无线控制系统。该系统包含接收和识别口令的主机,发送指令和接收指令的通信模块以及带有特定功能的智能车。主机识别口令后,以无线传送方式将指令发送给智能车,智能车按指令实现相应功能。主机和智能车都基于嵌入式系统。主机硬件电路由三星S3C6410处理器和外围电路组成,口令识别部分采用连续隐马尔科夫模型算法。实验表明,该系统有良好的稳定性和实用性。
关键词:口令识别;无线通信;连续隐马尔科夫模型
0 引言
语音是人类交流信息最自然、最方便、最有效的方法。用语音与机器交互是人类一直梦寐以求的事情。经过十几年的发展,基于隐马尔科夫模型的语音识别已经达到了应用要求。通过语音口令识别完成与机器交流变得顺其自然。人们与机器交流,大多是为了控制机器运作或获取其运行状态。目前应用广泛的总线控制系统,网络控制系统大多要求有数据线传送指令。无线通信技术让这种控制摆脱了地域的束缚。通过语音口令识别,机器“听懂”语音并将其“翻译”成指令,然后通过无线通信传输指令、控制远程智能车模式有着很好的应用前景。基于口令识别的控制系统与嵌入式系统有效结合,与未使用嵌入式系统比较更有便捷易用,显示出其优势作用。基于口令识别的无线控制嵌入式系统在可广泛应用于侦查、自动化控制领域。
本文给出基于口令识别的智能车无线控制的嵌入式系统。该系统首先获取语音口令并识别。识别口令完成后,解析成便于无线传输的控制指令帧。控制指令帧通过无线网络被传输到远程智能车。这种模式与单一的口令识别控制系统或无线控制系统相比,更有应用价值和实际意义。整个系统有三个模块,即主机模块、通信模块和智能车模块。主机实现语音信号采集和口令识别。主机是以S3C6410为核心的嵌入式系统,运行广泛应用的WinCE6.0操作系统。通信模块负责主机与智能车之间的通信。通信模块基于ZigBee设计,用TI公司CC2530F256芯片作为主芯片。智能车是基于51单片机控制的嵌入式系统,会根据主机指令运行。
本文以下内容分安排如下,第二节详细介绍了系统要求和系统硬件结构,主要包括主机板、智能车板的硬件设计,ZigBee通信模块设计。第三节详细介绍系统软件设计,主要包括口令识别算法设计,主机软件设计,无线数据发送方法,智能车程序设计以及通信设计。第四节给出实验结果以及总结。
1 系统硬件设计
对于一个基于口令识别的无线控制系统,主要有以下几个要求。
(1)完成语音口令识别功能,系统需要对人发出的口令迅速做出识别并实现。
(2)为了更快地响应用户口令,系统要有满足迅速反应的硬件和优化的算法,使得口令识别快捷稳定。
(3)通信模块要具有安全性,使得传送的指令保密又能安全到达对方。
在主机中使用稳定的嵌入式WINCE 6.0操作系统。通信模块使用基于IEEE802.15.4标准的局域网协议Zigbee.ZigBee是一种便宜的,可加密,低功耗的近距离无线组网通讯技术。
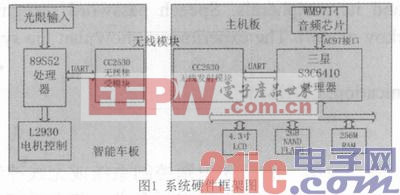
本文中,主机嵌入式系统是以ARM11芯片三星公司S3C6410作为主处理器。系统集成了256M DDR RAM,NAND Flash 2GB存储器。S3C6410处理器主频为533Mhz,最高可达667Mhz,具有低功耗、高性能等特点。主处理器通过支持AC97标准的WM9714音频芯片接受音频输入。该芯片由ADC/DAC,话筒混频器,可编程增益放大器(PGA)和锁相环组成。还提供PCM/I2C接口和AC'97接口。
本系统硬件框图如图1所示:




评论