
高度传感器在无人直升机上的应用及故障分析
摘要:为了预防无人直升机使用过程中发生与高度传感器相关的故障,减小飞行安全事故的可能性,针对某型无人直升机在执行任务中发生的一次飞行故障,结合高度传感器的工作原理和在无人机飞行控制中的应用,采用可靠性分析中的故障树的方法,分析了存在的故障原因。最后针对出现的高度传感器故障原因提出了解决和预防的方法。
关键词:无人机;高度传感器;传感器故障;故障树
0 引言
小型无人直升机在民用领域以及国防建设中有着广泛的应用前景,其安全可靠性也越来越受到人们的重视。而保证微小型无人直升机安全飞行的前提则是机载传感器系统的可靠性。机载传感器是飞控系统的基础部件,也是最容易产生故障的环节之一。由于机载传感器工作在高温强振动的环境下,极易引起传感器性能不稳定并引发故障。高度计是飞行器中重要的传感器,对于飞行器的安全飞行与自主控制具有十分重要的作用,在日常使用无人直升机的过程中,发生过因为高度传感器失灵,导致的飞行事故。本文对高度传感器在无人直升机中的应用进行研究,分析造成这一事故的原因,并提出了解决办法。
1 高度传感器在无人直升机飞控中的重要作用
1.1 常用的测量高度方法
用来测量飞行高度的方法有很多种,根据不同的测量原理可以测量出不同定义下的飞行高度。常用的有以下几种:
(1)利用无线电波反射特性来测量飞行高度的方法,是将高度测量转换为对时间的测量。电磁波在空中以光速c传播且碰到地面能够反射。因此,装在飞机上的无线电发射机将电磁波发射到地面后,机上接收机的天线经△t时间收到反射波,根据△t可测出飞机的真实飞行高度H。
(2)通过测量飞机垂直地面运动的线加速度来测量飞行高度,飞机相对于地面的垂向运动的距离(高度)h、速度V和加速度ay间的关系如式(1)所示:
![]()
(3)通过测量大气参数来测量飞行高度,在重力场内大气的压力、大气密度均随高度增高而减小,尽管各自的变化规律不同,但却都是有规律可循的,于是,可以通过测量大气压力或大气密度来间接测量飞行高度。
在使用的无人机上使用的高度传感器,选用的是第三类方法的传感器。其是由Honeywell公司生产的HPA200-W2DB高度传感器,是一种硅压阻式压力传感器,具有灵敏度高、后续电路简单且集成化程度高、综合精度较高、无传动部件、性能稳定、可靠性高、体积小、质量轻,以及使用方便等优点,很适合在无人机上的应用。
1.2 高度传感器的工作原理
为了统一评估飞机的动力学特性,比较和计算飞行状态,世界各主要航空国家制定了一种假想的标准大气模型。该模型排除了地理坐标、季节和昼夜等因素对大气物理特性的影响,认为大气的温度、密度和压强随高度按固定的规律变化。因此,可以利用大气压强数值计算无人机的飞行高度。
标准气压——高度公式为:
![]()
式中:PH为高度H下的气压;β为温度梯度;g为重力加速度;R为空气专用气体常数;Tb,Hb,Pb为高度分层中相应层的大气温度、标准气压高度和气压的下限值。本文所论述的系统应用于低空飞行的某小型无人机,飞行高度小于11km,可以取β=-6.5×10-3 k·m-1,g=9.8 06 65 m·s-2,R=287.052 87 m2·k-1·s-2;根据相关文献提出的大气温度、高度及压强分层的方法,选取Tb,Hb,Pb的值。
测得气压值后,代入式(2)可计算出无人机飞行高度。
1.3 高度传感器的数据在飞控系统中的应用
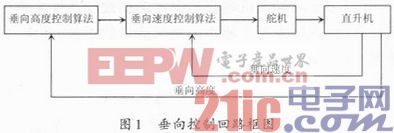
直升机的垂向控制是通过控制主旋翼的升力而实现的,垂向控制的高度信息和垂向速度信息就来自于高度传感器,记录下地面的气压,和直升机的飞行时气压值进行比较,由于飞的越高压力越低,通过两者之间的差就能计算出直升机当前的高度。通过高度的变化,就可以计算出垂向的速度,一旦高度传感器出现故障,无人直升机的垂向控制系统就会I叶j现问题,导致严重的事故。垂向控制回路,如图1所示。
2 高度传感器的故障现象及原因分析
某型无人直升机在进行飞行时,突然发生高度显示失灵,无人直升机失去控制,截图如图2所示。
对事故点的高度传感器高度数据进行截取,分析数据,绘制高度变化曲线如图3所示。
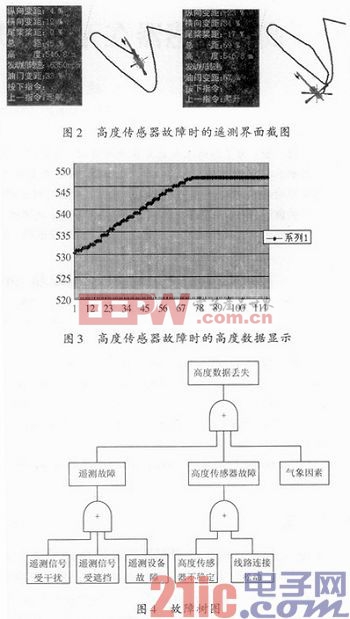
由图2和图3可以看出,无人直升机在飞行过程中,突然高度数据丢失,按照可靠性分析中的故障树方法,列举出可能造成故障的原因如图4所示。











评论