
远程维护控制系统串口通信协议研究
0 引言
当前,我军装备新老结合,各技术水平层次装备共存,为实现对装备的远程检测与维护,达到无人值守、精确监视与控制的目标,需要建立远程维护控制系统。远程维护控制系统首先要解决的问题就是统一装备信息接口,制定统一的通信协议。对于装备而言,选择串行通信接口是合理的,串行通信接口(RS232)是计算机标准配置的通信接口,可以根据具体的情况构建计算机与装备之间的通信,实现在串口之上的数据传输。
1 串口通信协议分层结构
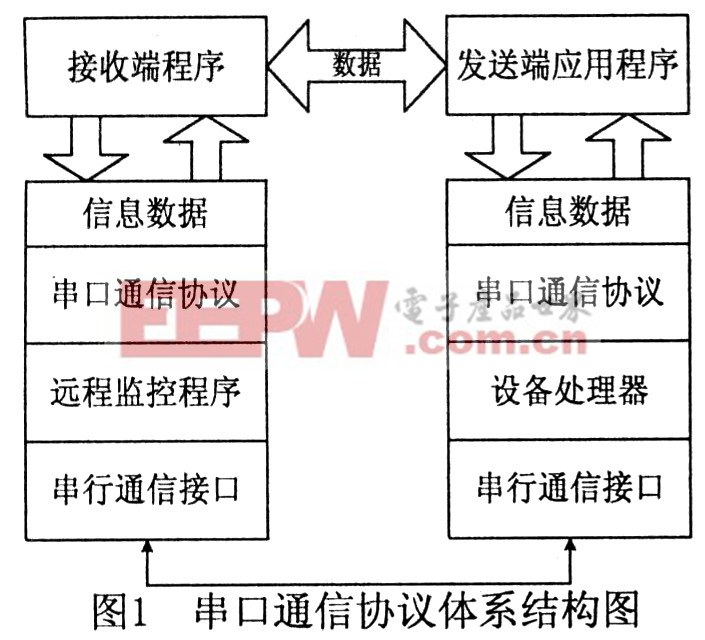
为了实现计算机与装备之间的通信,并减小协议设计的复杂性,可以按层次方式进行组织,各层提供的服务可以分为面向连接的服务和无连接的服务。串口通信协议的设计是基于面向连接的服务,其体系结构图见图l。
2 串口通信协议
2.1 串口通信协议分析
现役装备现状研究表明,装备信息接口通信协议标准不统一,各研制单位制定了针对本单位研制装备型号的通信协议,信息帧结构特殊,通信协议中各部分位数各异,数据编码方式不同,无法实现装备之间的“三互”操作。同时,部分装备无信息接口,不能实现数据的传输与设备远程控制。
2.2 串口通信协议设计
根据装备实际运用需求,通信协议的制定应当以实现远程维护与控制为目标,并为设备的功能扩展留有足够的空间,通信协议中应包含设备控制、参数监视以及参数设置等内容。
在分析现有装备通信协议的基础上,制定了适合现役装备串口通信协议标准。本标准的通信协议严格规定了各信息帧格式与帧格式中的位数,协议中分为五类帧结构,握手类帧结构、控制类帧结构、监测类帧结构、维护类帧结构、补充类帧结构,各类帧结构的设计充分考虑了与硬件的优化结合。
2.2.1 握手类帧结构
握手类帧结构是设备与接口联机的一类帧结构。接口向设备定时发送询问帧,如果设备开机,则设备向接口发送应答帧,接口接收到设备发送的应答帧后,握手成功,可以进行下一步操作。握手类帧结构为:
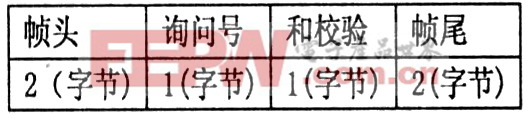
应答帧结构与握手帧结构相同。
2.2.2 控制类帧结构
控制类帧结构是对于需要实现控制类功能而制定的帧结构,控制类帧可以实现对设备的控制(如开、关机等)。接口向设备发送控制类帧,设备接收到控制类帧,并执行该控制类帧中所包含的命令,同时向接口发送响应帧,接口接收到响应帧后,才可以进行下一步操作。控制类帧结构:
2.2.3 监测类帧结构
监测类帧结构是对于需要实现监测类功能而制定的帧结构,监测类帧可以实现对设备的各项参数与状态监测。当设备接收到接口发送的监测类信息帧后,根据信息帧中要求,向接口发送包含监测内容的响应帧。监测类帧结构:
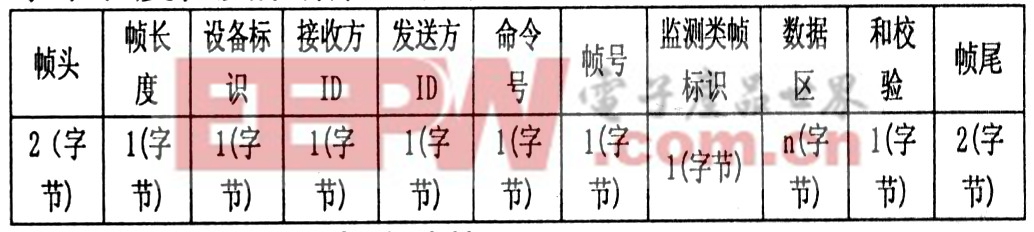
当设备接收到接口发送的监测类信息帧后,向接口发送响应帧其帧结构为在监测类帧标识位后加入数据区字节长度位及数据位。其帧结构为:








评论