
利用捕获比较功能实现MSP430与微机串行通信的研究
1 引言:
MSP430系列单片机是美国TI公司于2000年推出的新一代超的低功耗16位单片机。由于它具有功能完善、超低功耗、开发简便、成本低廉等特点,目前已经在国内得到了广大工程技术人员的关注和应用。工程师们在进行机型选择时主要考虑该机型的性能和成本,因此在小型仪表以及普通应用中MSP430的11x系列、31x系列、41x系列受到了许多工程师的青睐。这些机型有一个共同的特点就是内部没有硬件UART模块。这就带来一个问题,这些单片机怎样实现串行通信呢?本文就针对这一问题进行研究,分析研究了MSP430中捕获比较功能的特点,以及利用捕获比较功能实现串行通信的方法。并以MSP430F413为例介绍了实现它与微机之间进行串行通信的软件代码和硬件电路。
1 捕获比较功能的介绍:
MSP430系列单片机中都集成了捕获比较的功能模块。捕获比较功能的引入主要是为了提高I/O端口处理事务的能力和速度。捕获比较并不是非常新的概念,使用过Intel 的16位单片机中如80196MC的读者就会发现,MSP430中的捕获比较功能和80196系列单片机中的EPA功能有一些相似之处。以下结合实现串行通信的需要,简要介绍有关捕获比较的有关概念。
捕获比较模块用于捕获应用事件的发生时间,或产生定时间隔。如果相应的中断允许,那么完成一个时间捕获或一次定时间隔,捕获/比较模块都将产生中断。每一个捕获比较模块都可以对应一组硬件引脚。图1是捕获比较模块的结构框图。
捕获功能可以捕捉选定输入引脚的状态的变化,它可以选择捕捉上升沿、下降沿、前后沿。如果捕捉到了相应的变化,则定时器计数值将被复制到捕获比较寄存器CCR中,并会产生相应的中断。在串行通信中,正是利用捕获功能的特点来捕捉起始位的信息。
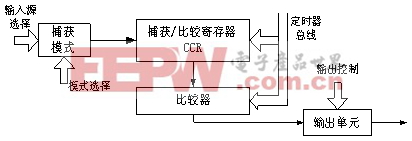
图1:捕获比较模块结构框图
比较功能是借助比较器不断地将CCR中的设定值与定时器中的计数值相比较,当二者相等时,就产生中断,并产生设定的输出。利用比较功能,可以获得精确的时间间隔,利用该特性可以构造一个精确的波特率发生器,为串行通信提供时间基准。
2 利用捕获比较实现串行通信的方法
本节具体介绍实现异步串行通信时,捕获和比较功能是如何工作的。
2.1 接收过程
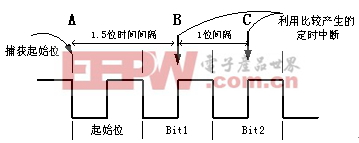
图2:在串行通信接收过程中捕获比较功能时序分析示意图
在异步串行通信中,每个数据帧一般由1位起始位、8位数据位、1位奇偶校位、1位停止位组成。图2所示为一个数据帧前3位的时序。在接收这种格式的数据帧时,首先要确定起始位,用来进行帧同步。在MSP430中是利用捕获功能来捕捉起始位的下跳沿(详见附录程序代码)。如图2,在A点捕获到起始位,系统将此刻的定时器值(T0)存放入CCR中,并产生中断。对A点所产生中断的处理非常重要。在该中断处理程序中,将捕获功能转换为比较功能,并将1.5位的时间间隔(T1.5)加到CCR中,即CCR=T0+T1.5。这样当到达1.5位时间间隔时(B点),即定时器的值等于T0+T1.5。将会由此比较功能触发一次中断,这样就实现了1.5位时间间隔的精确定时。在该中断处理程序中,可以读取输入引脚的状态,从而接收到Bit1的信息,然后再利用比较功能产生1位时间间隔(T1)的定时。此后,当下一个T1时间到达时,比较功能又会触发一次中断(C点)。在这时的中断服务程序中可以读取Bit2的信息。如此重复8次,就可以完成一个字节数据的接收。
2.2 发送过程
相对于接收过程,发送过程比较简单。利用比较功能产生一个间隔为1位时间(T1)的时序,相当于一个波特率发生器。在每一次比较功能触发的中断服务程序中发送一位数据,如此循环执行,这样就可以完成一个数据帧的发送。异步串行通信的一个数据帧往往是10位或11位。对于这点可以利用MSP430是16位机的特点,将数据帧的所有位安排在一个待发送字中,然后移位发送,而不需要专门编程产生起始位和停止位。(详见附录中的程序代码及说明)
2.3 波特率的确定以及中断的安排
从以上的分析可以看出,串行通信的波特率主要是与1位时间间隔T1有关,T1可以通过以下公式确定:
![]() 公式1
公式1
其中Tclk是指与该捕获比较模块相对应的定时器的基准频率,如使用ACLK作为时基则Tclk=32768;使用MCLK作为时基则Tclk=1M。式中的Baud就是期待的波特率值。MSP430每个捕获比较模块中的捕获和比较对应同一个中断地址,因此两者需要共享一段中断服务程序。这样就要求在中断服务程序中能区分触发中断的类别。主要是通过CCTL控制寄存器中的CAP位来区分[3]。另一方面接收和发送的也都需要在这段服务程序中处理,应该加以区分。(详见附录中的程序代码及说明)
3 超低功耗串行通信实例
3.1电路结构及其特点
本文中使用上述的原理和方法,在MSP430F413和MAX3221构成的电路中实现了与微机的串行通信,电路原理如图3。该电路不但完成了串行通信,还进一步实践了超低功耗的应用原理。MSP430单片机的一大特点就是超低功耗,它有多种功耗状态可以编程控制[4]。MAX3221也是具有低功耗特点的接口器件,通过EN、FORCEON、FORCEOFF引脚可以控制驱动器、接收器的工作状态,启动或禁止自动降低功耗功能,从而使其工作在不同的能耗状态,达到降低功耗的目的[2]。控制及其状态详见表1
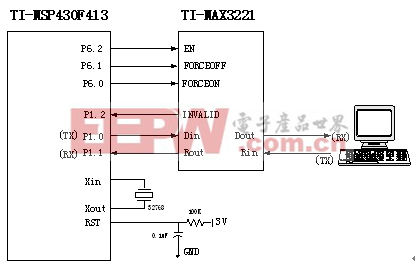
图3 MSP430F413超低功耗串行通信电路原理图
3.2超低功耗的解决方案
选择了低功耗的器件,还要合理的控制才能达到最低的能耗[1]。对于本应用,MSP430处于从机工作状态。针对这种应用以下方案可以有效地降低能耗:初始化程序结束后,设定MSP430F413工作在功耗模式4等待P1.2引脚的中断。这时CPU将关闭,其能耗最低(0.1μA)。另一方面,初始控制MAX3221进入自动调节能耗状态。如果微机不发送信号,即Rin输入无效,驱动器和接收器都将关闭,进入很低功耗的待机状态(1μA)。












评论