
基于Modbus RTU通信协议的伺服电机联动控制系统
摘要:针对改进传统的复杂伺服电机联动控制系统的目的,提出一种新的设计方案,采用Modbus RTU通信协议,简化了系统复杂度,降低了成本,并且通过自行设计接口转换电路,提高了通用性;另外,该系统通过改进优化的软件设计,能实现系统的连续运行,解决了定位数据运行模式只能定位不能连续运行的问题。先介绍总的系统设计,然后介绍Modbus RTU协议以及具体实现方法,最后以LabView编程为例,介绍上位机软件系统的实现过程。
关键词:Modbus RTU;通信协议;伺服电机;LabView
工业控制已从单机控制走向集中监控、集散控制,如今已进入网络时代,工业控制器连网也为网络管理提供了方便。Modbus就是工业控制器的网络协议中的一种,通过此协议,控制器相互之间、控制器经由网络(例如以太网)和其它设备之间可以通信。基于上述原理,文中设计了一套伺服电机联动控制系统,采用Modbus RTU通信协议进行数据通信,达到能够同时对2台电机联动控制的目的。
1 系统构成以及原理
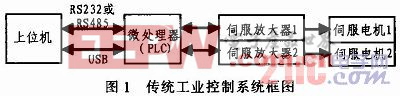
在工业控制过程中,电机是控制系统一个重要组成部分。一般通过微处理器控制电机继而达到实现自动控制的目的。而上位机通过串行或者并行通信协议控制微处理器,来实现远程控制。具体框图如图1所示。
文中提出了一种新的伺服电机联动控制系统的设计方案,采用Modbus RTU协议,使上位机(PC)直接可以和伺服放大器进行通信,其框图如图2所示。本设计上位机采用一般PC即可,最好带RS485接口。伺服放大器选用富士公司RYH201F5-VV2,伺服电机选用富士公司GYS201D5-RC2。由于系统设计过程中节省了微处理器,所以不仅在数值处理运算和数据传送上运行速度快,实时性强,而且简化了系统复杂度,降低了成本。

由于有的PC不自带RS485接口,因此上位机不能利用Modbus通信协议来控制伺服放大器。虽然市场没有专门接口转换电路,但是由于一般上位机(PC或者工控机等)都自带USB接口,自己根据Modbus协议和实验室现有器件,自行设计接口转换电路,接口图如图3所示。

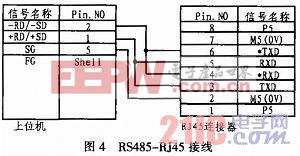
其中USB转RS232和RS232转RS485可以在市场买到。RS485-RJ45具体接线如图4所示。

伺服电机相关文章:伺服电机工作原理









评论