
基于机器视觉的物体包装盒实时贴标系统设计
摘要:为了实现打印贴标机智能贴标的需求,提出了一种基于机器视觉的物体包装盒实时贴标系统设计方案,并完成了系统的软件设计和整套硬件测试。该系统的硬件部分主要用来获取图像数据以及进行打印贴标操作,软件部分采用基于轮廓提取和形状特征识别相结合的图像处理技术,能够完成对其输出图像进行目标识别和实时定位,并通过串口通信将数据转发给控制系统。实际应用表明,该系统具有操作简便、测试准确的特点,达到了设计要求。
关键词:机器视觉;目标识别;实时定位;串口通信
目前,工业生产上对物体包装盒的贴标主要采用光电传感器等触发机器的方式,并通过计算距离、速度等方式估算目标物的位置,这样贴出来的标签精度不高,需要再度进行人工检测,费时耗力,不能满足大规模的高精度贴标需求。由于机器视觉系统可以快速获取大量信息,而且易于自动处理,也易于同设计信息以及加工控制信息集成,因此,机器视觉已广泛应用于工业检测、工业探伤、精密测控、自动化生产、邮政自动化、粮食选优、显微医学操作以及各种危险场合工作的机器人等领域。打印贴标行业为了提高生产力,获取快速、高效的贴标方法,引进机器视觉技术已成为大势所趋,首先通过对目标物的识别和实时定位来获取所需的位姿信息,再通过摄像机标定得到目标物在线上的精确坐标,最后交由贴标机器进行贴标操作。
可见,对目标物的实时位姿信息的获取变得非常重要。为了实现对目标物的快速识别和准确定位,在做了需求分析的基础上,提出并设计了一种基于机器视觉的物体包装盒实时贴标系统(以下简称“贴标系统”)设计方案。该系统能够完成对目标物准确贴标,具有应用价值。
1 系统需求分析
针对为满足实时获取物体包装盒精确位置的需求,结合实际平台与应用场景,经过分析主要从物体轮廓进行切入,因所有物体的外包装盒均为规则的长方体,故而采取经过一系列图像预处理后再对目标物进行矩形检测的办法得到包装盒贴标面的中心点坐标。
要想完成以上系统的设计,需要做好以下几个方面。首先需要能够驱动工业相机,并通过硬件触发的方式使相机能够在合适的时机获取多张图片;其次,应能对相机获取到的图片进行有效的图像处理,需进行一系列的算法设计从而能够实时获取目标物的图像坐标;再次,还应进行摄像机标定,将获取到的目标物图像坐标转换成世界坐标系也就是机器线上的真实坐标;最后系统要能够与上位机控制部分集成并能够持续不间断的运作,直到系统要求退出。
2 系统总体设计
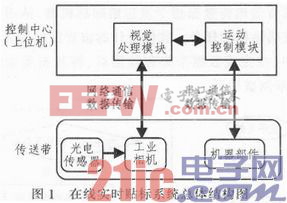
该贴标系统总体结构图如图1所示,首先传送带将目标物输送至工业相机的视野,并触发光电传感器给出一个3.3~12 V高电平信号触发相机进行抓拍,获取目标物的图像信息;然后,通过千兆网线将图像数据传输至控制中心(上位机),上位机的视觉处理模块将对获取到的图像进行处理,并将处理得到的数据交由运动控制模块;接着,运动控制模块根据获取到的有效数据实行对机器部件的命令控制;最后,机器部件根据上位机的指示进行打印和贴标操作,从而实现一次完整的贴标过程。






评论