
基于ARM7处理器的CAN总线网络设计
1 引言
can(controller area network)即控制器局域网络,最初是由德国bosch公司为解决汽车监控系统中的自动化系统集成而设计的数字信号通信协议,属于总线式串行通信网络。由于can总线自身的特点,其应用领域由汽车行业扩展到过程控制、机械制造、机器人和楼宇自动化等领域,被公认为最有发展前景的现场总线之一。
can总线系统网络拓扑结构采用总线式结构,其结构简单、成本低,并且采用无源抽头连接,系统可靠性高。本设计在保证系统可靠工作和降低成本的条件下,具有通用性、实时性和可扩展性等持点。
2 系统总体方案设计
整个can网络由上位机(上位机也是网络节点)和各网络节点组成(见图1)。上位机采用工控机或通用计算机,它不仅可以使用普通pc机的丰富软件,而且采用了许多保护措施,保证了安全可靠的运行,工控机特别适合于工业控制环境恶劣条件下的使用。上位机通过can总线适配卡与各网络节点进行信息交换,负责对整个系统进行监控和给下位机发送各种操作控制命令和设定参数。
网络节点由传感器接口、下位机、can控制器和can收发器组成,通过can收发器与总线相连,接收上位机的设置和命令。传感器接口把采集到的现场信号经过网络节点处理后,由can收发器经由can总线与上位机进行数据交换,上位机对传感器检测到的现场信号做进一步分析、处理或存储,完成系统的在线检测,计算机分析与控制。本设计can总线传输介质采用双绞线。
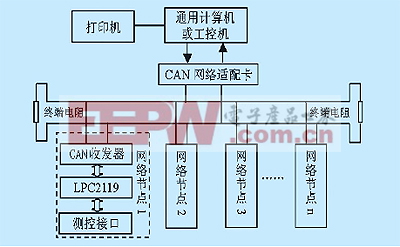
图 1 can总线网络系统结构
3 can总线智能网络节点硬件设计
本文给出以arm7tdmi内核philips公司的lpc2119芯片作为核心构成的智能节点电路设计。该智能节点的电路原理图如图2所示。该智能节点的设计在保证系统可靠工作和降低成本的条件下,具有通用性、实时性和可扩展性等特点,下面分别对电路的各部分做进一步的说明。 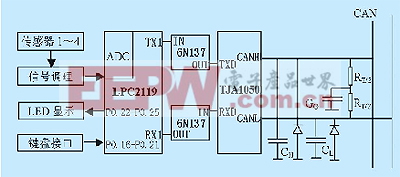
图2 can总线智能网络点
3.1 lpc2119处理器特点
lpc2119是philips公司推出的一款高性价比很处理器。lpc2119是基于一个支持实时仿真和跟踪的16/32位arm7tdmi-stm cpu,并带有128kb嵌入的高速flash存储器。独特的加速结构使32位代码能够在最大时钟速率下运行,对代码规模有严格控制的应用可使用16位thumb模式将代码规模降低超过30%,而性能的损失却很小。实行流水线作业,提供embedded ice逻辑,支持片上断点和调试点,具有先进的软件开发和调试环境。
lpc2119具有非常小的64脚封装、极低的功耗、多个32位定时器、4路10位adc、2路can、pwm通道、多个串行接口,包括2个16c550工业标准uart、高速i2c接口(400 khz)和2个spi接口,46个gpio以及多达9个外部中断使它们特别适用于汽车、工业控制应用以及医疗系统和容错维护总线。









评论